

Pneumatic inchworm-like soft robot based on 3D printing technology
A 3D printing and inchworm imitation technology, which is applied to 3D object support structures, manipulators, program-controlled manipulators, etc., can solve the problems of lack of manufacturing accuracy in production time, and achieve fine appearance, high molding accuracy, and thin printing layers.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
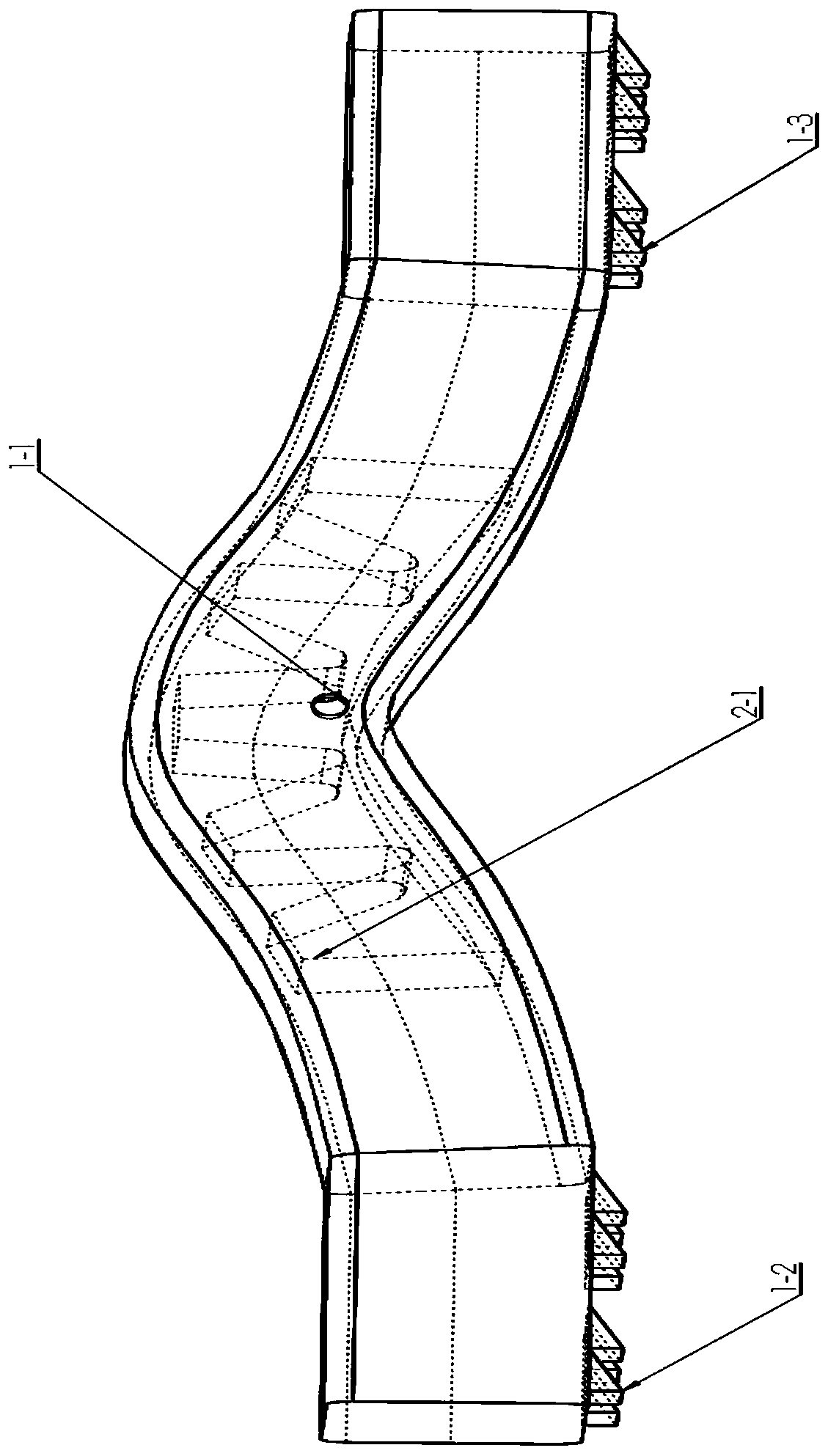
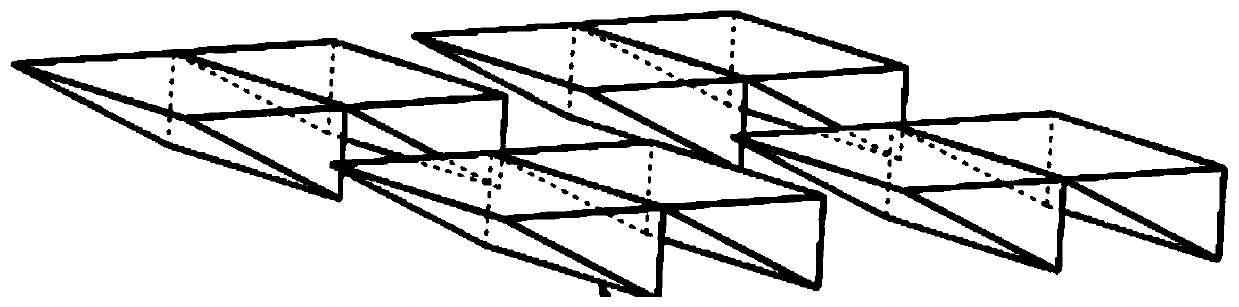
[0025] The design process of the three-dimensional model of the soft robot is: using Solidworks software to design the three-dimensional model of the robot imitating the inchworm robot driven by magnetic fluid, the model includes a head part, a torso part and a tail part, such as figure 1 shown. The size of the head part and the tail part is 20mmX20mmX30mm, the section size of the arc-shaped torso part is 20mmX20mm, the arc length is 130mm, and the total horizontal length from the head part to the tail part is 120mm. Such as figure 1 , figure 2 As shown, the bottom surface of the head part and the tail part is respectively provided with a triangular head foothold 1-3 and a tail foothold 1-2, wherein 2 triangular prisms (4mmX2mmX4mm) are a group, and the head part and the tail part There are 4 groups on the bottom surface, and the triangles all have the same orientation, which is used for crawling on the ground. The head part and the tail part are respectively sealed and co...
Embodiment 2
[0027] The 3D printing manufacturing process of the inchworm-like soft robot is as follows: the 3D printing method adopted is stereolithography (SLA), and polyurethane acrylate (PUA) and 2,4,6 (trimethylbenzoyl) diphenyl Phosphine oxide (TOP) is used as the prepolymer and photoinitiator of the photosensitive resin respectively, and the two are formulated into a photosensitive resin with a mass fraction of 95% and 5%; the slice thickness of the 3D printer printing model is set to 0.1mm, and the designed Import the 3D model into the 3D printing equipment (preheat to 30°C to start printing, automatically heat to 35°C to maintain a constant temperature, laser characteristics: EN 60825-1:2007 certified Class 1 laser product 405nm violet laser, 250mW laser; laser spot size: 140μm; peeling mechanism: wiper sliding peeling process), complete the molding of the overall structure of the soft robot (printing time depends on the size of the model and its structural complexity). After the ...
PUM
| Property | Measurement | Unit |
|---|---|---|
| length | aaaaa | aaaaa |
Abstract
Description
Claims
Application Information
 Login to View More
Login to View More