Robot material frame grabbing planning and collision detection method
A collision detection and robot technology, applied in the field of robotics, can solve problems such as cumbersome grasping methods for material frames, and achieve the effect of reducing model making and importing and quickly grasping results.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
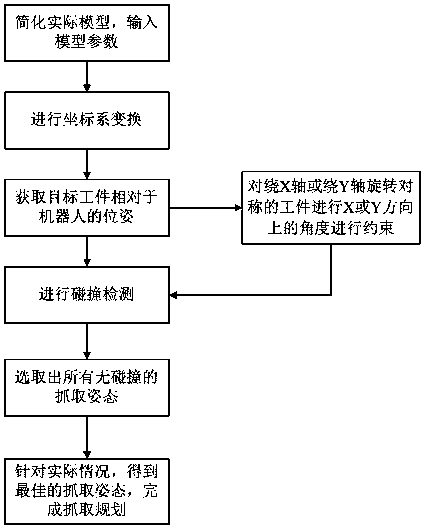
[0074] Such as figure 1 As shown, a robot material frame grasping planning and collision detection method includes the following steps:
[0075] S1: Simplify the actual model, input model parameters to establish a simplified model;
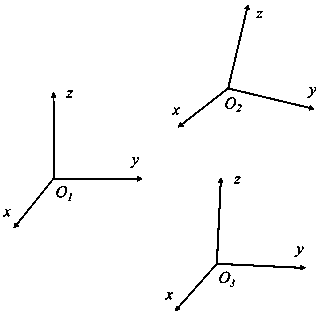
[0076] S2: Establish a coordinate system according to the simplified model, and perform coordinate system transformation;
[0077] S3: Obtain the pose of the target workpiece relative to the robot;
[0078] S4: After the pose is transformed, the grasping pose is obtained, and brought into the coordinate system for collision detection;
[0079] S5: Make grasping planning based on collision detection.
[0080] In the implementation process, by abstracting and simplifying the complex environment, establishing a simplified model, and performing collision detection and grasping planning through coordinate system transformation, the cumbersome model making and importing can be reduced, and the grasping results can be quickly given.
[0081] More spe...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More