

Full-automatic tomato picking and transporting integrated robot and using method thereof
An automatic picking and robotic technology, applied in the field of agricultural robots, can solve problems such as inability to systematize operations, reduce output value, and fall behind in the field of tomato harvesting, achieve high-efficiency picking operations, improve labor efficiency, and achieve the effects of non-destructive picking operations.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0043] In order to make the objects, features and advantages of the present invention more obvious and easy to understand, the embodiments of the present invention will be clearly and completely described below with reference to the specific embodiments involved in the accompanying drawings. Obviously, the described embodiments are only some, but not all, embodiments of the present invention. Based on the embodiments of the present invention, all other embodiments obtained by those skilled in the art without creative work, such as embodiments that only change the usage without changing the basic principles involved in the claims, fall within the protection scope of the present invention.
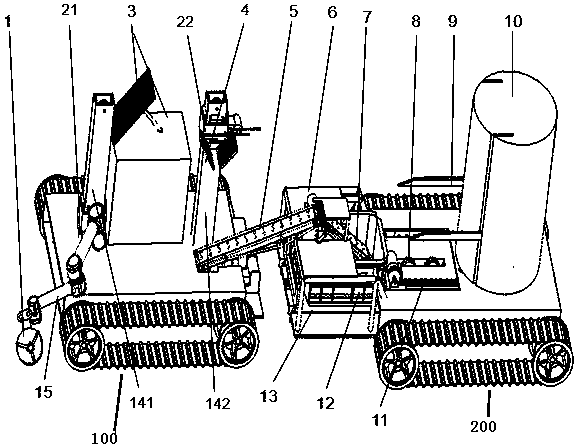
[0044] like figure 1 A fully automatic tomato automatic picking and transporting integrated robot is shown, including STM32 single-chip microcomputer, sensor group, battery, pneumatic system, picking vehicle 100 and transport vehicle 200. The picking device and the output end extend to the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More