

Simultaneous positioning and mapping method for autonomous mobile platform in rescue scene
An autonomous mobile and platform technology, applied in image enhancement, image analysis, image data processing, etc., can solve problems such as smoke influence, uneven illumination, random noise, etc., and achieve the effect of improving robustness
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0062] In order to make the purpose, technical solutions and advantages of the embodiments of the present invention clearer, the technical solutions in the embodiments of the present invention will be clearly and completely described below in conjunction with the drawings in the embodiments of the present invention. Obviously, the described embodiments It is a part of embodiments of the present invention, but not all embodiments. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without making creative efforts belong to the protection scope of the present invention.
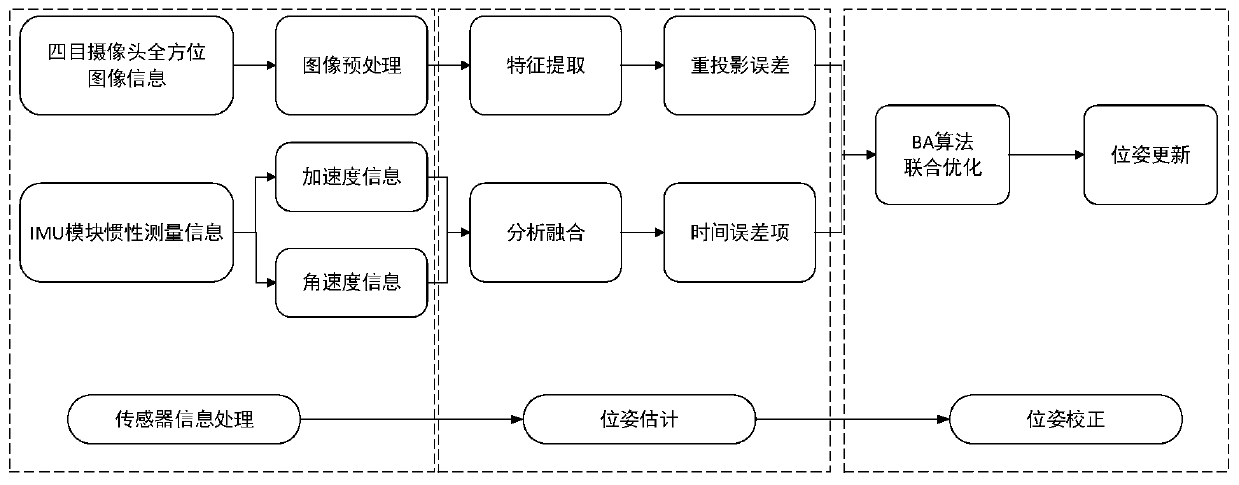
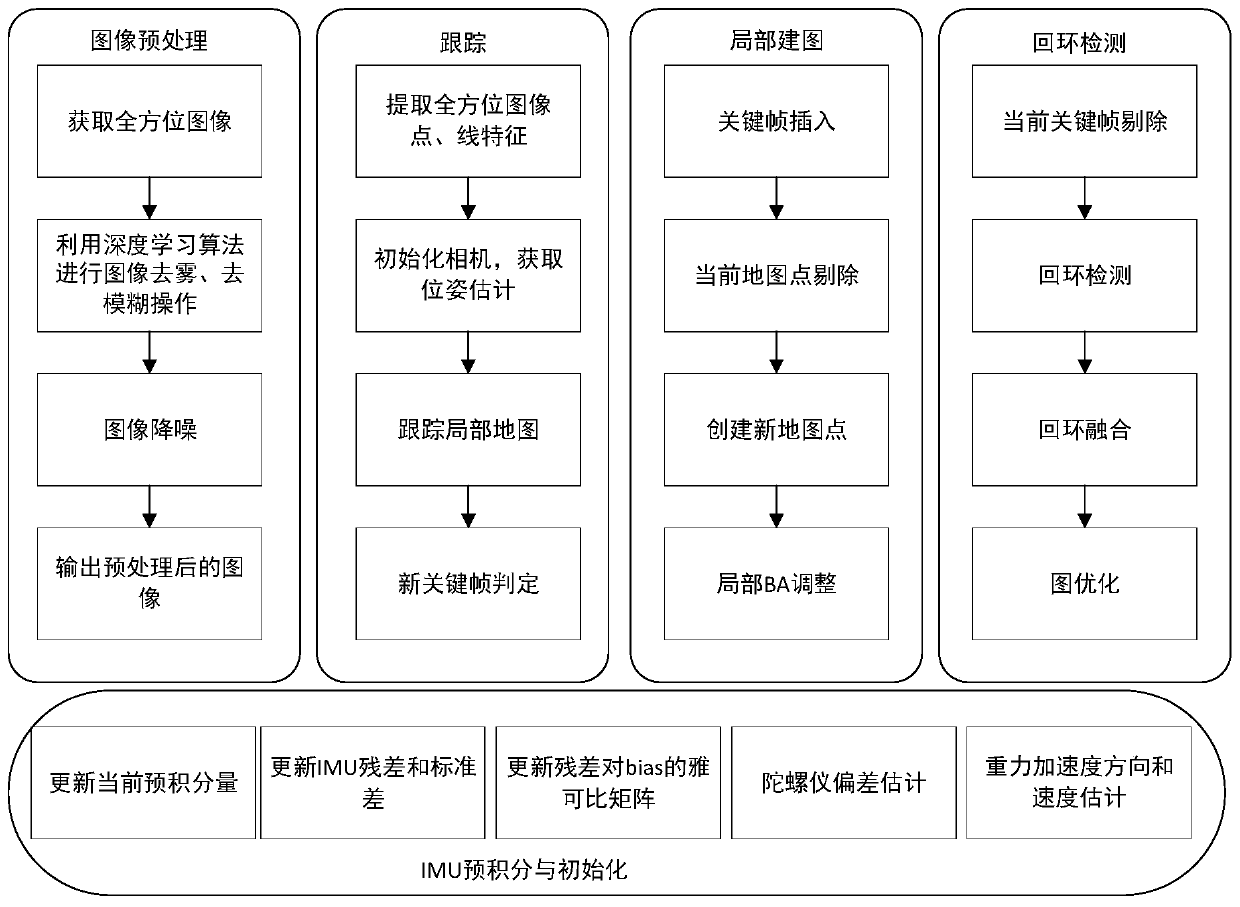
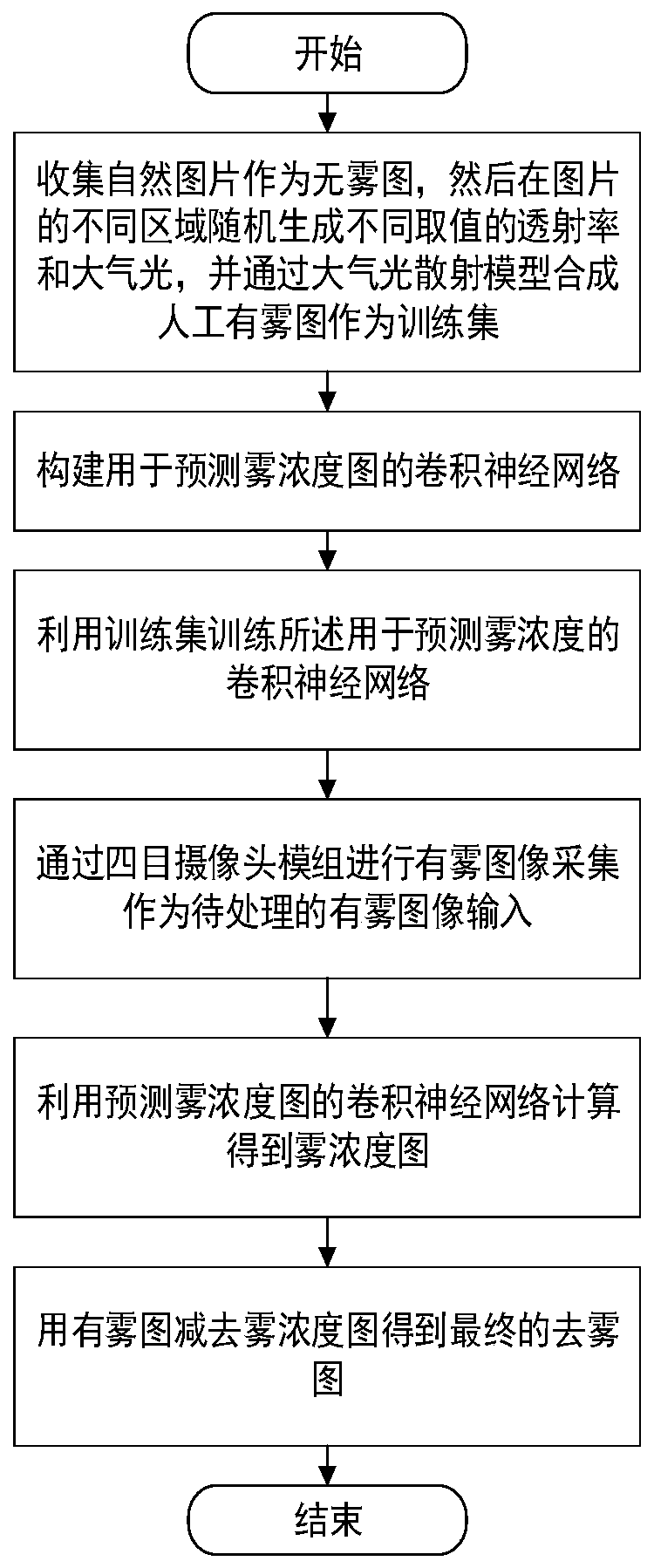
[0063] Step S1, acquire omni-directional images through four-eye cameras, and perform preprocessing on the images to obtain a defogged image.
[0064] For the smoke phenomenon in the rescue scene, the smoke will increase the brightness of the picture and reduce the saturation. Using deep learning algorithm for image defogging processing, usi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More