Target point cloud identification method and device, electronic equipment and storage medium
A target point and cloud recognition technology, applied in the computer field, can solve problems such as high manpower input costs, low efficiency, and difficulty in obtaining training data
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
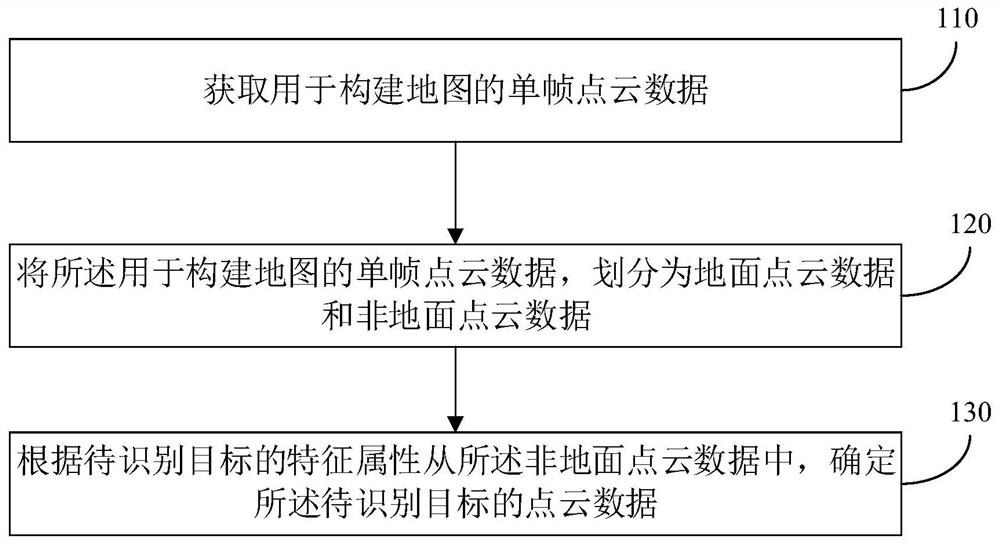
[0030] figure 1 It is a flow chart of a target point cloud recognition method provided by Embodiment 1 of the present invention. This embodiment is applicable to the scene of recognizing a target point cloud in a single frame of point cloud data, and the target point cloud is specifically a pedestrian, for example. The point cloud of the vehicle, the point cloud of the vehicle, etc. In this embodiment, an explanation is made by taking the target point cloud as a point cloud of a pedestrian as an example. The method can be executed by a target point cloud recognition device, and the device can be realized by software and / or hardware.
[0031] Such as figure 1 As shown, the method specifically includes the following steps:
[0032] Step 110, acquiring single-frame point cloud data for building a map.
[0033] Wherein, the single-frame point cloud data generally refers to the point cloud data obtained by scanning a circle of the vehicle radar, that is, 360°.
[0034] Step 12...
Embodiment 2
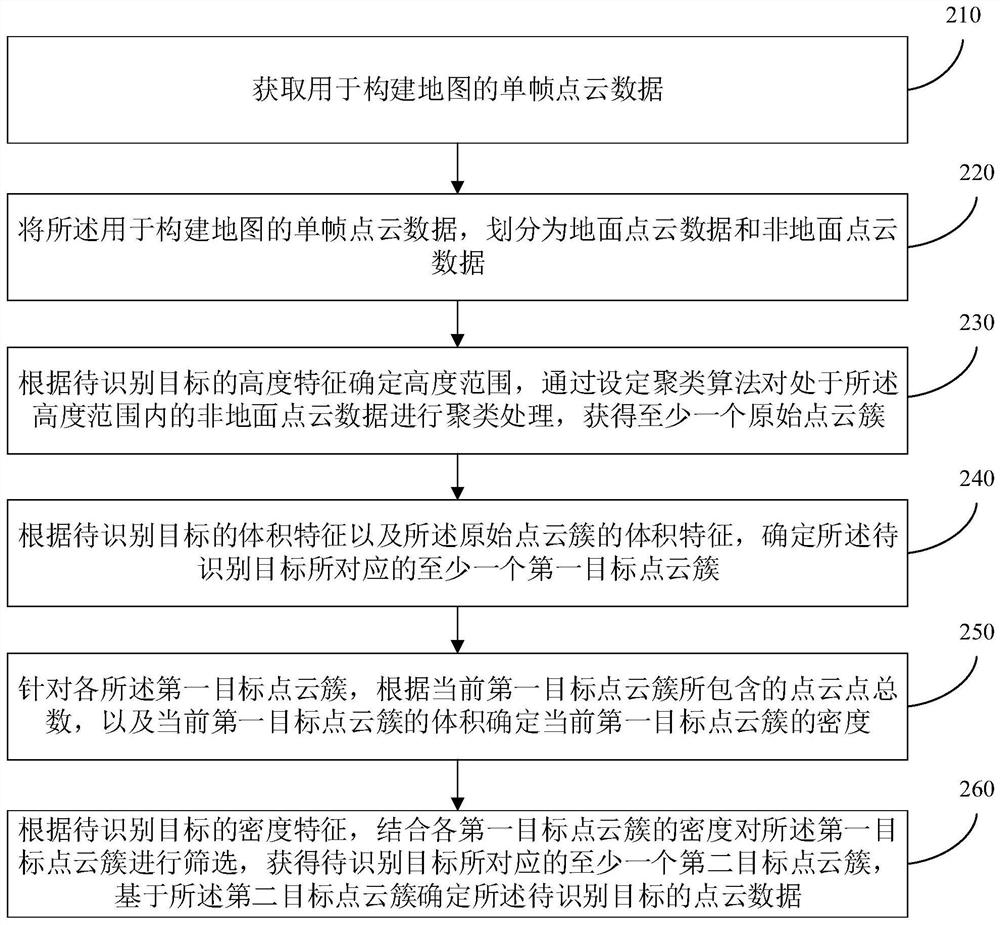
[0058] figure 2 It is a flow chart of a target point cloud recognition method provided by Embodiment 2 of the present invention. On the basis of the above-mentioned embodiments, the above-mentioned step of "determining the target to be recognized based on the first target point cloud cluster" in this embodiment "Point cloud data" gives a specific implementation method to accurately identify the target point cloud. The explanations of terms that are the same as or corresponding to those in the foregoing embodiments are not repeated here.
[0059] see figure 2 The target point cloud recognition method provided in this embodiment specifically includes the following steps:
[0060] Step 210, acquiring single-frame point cloud data for building a map.
[0061] Step 220: Divide the single-frame point cloud data used to construct the map into ground point cloud data and non-ground point cloud data.
[0062] Step 230: Determine the height range according to the height characteri...
Embodiment 3
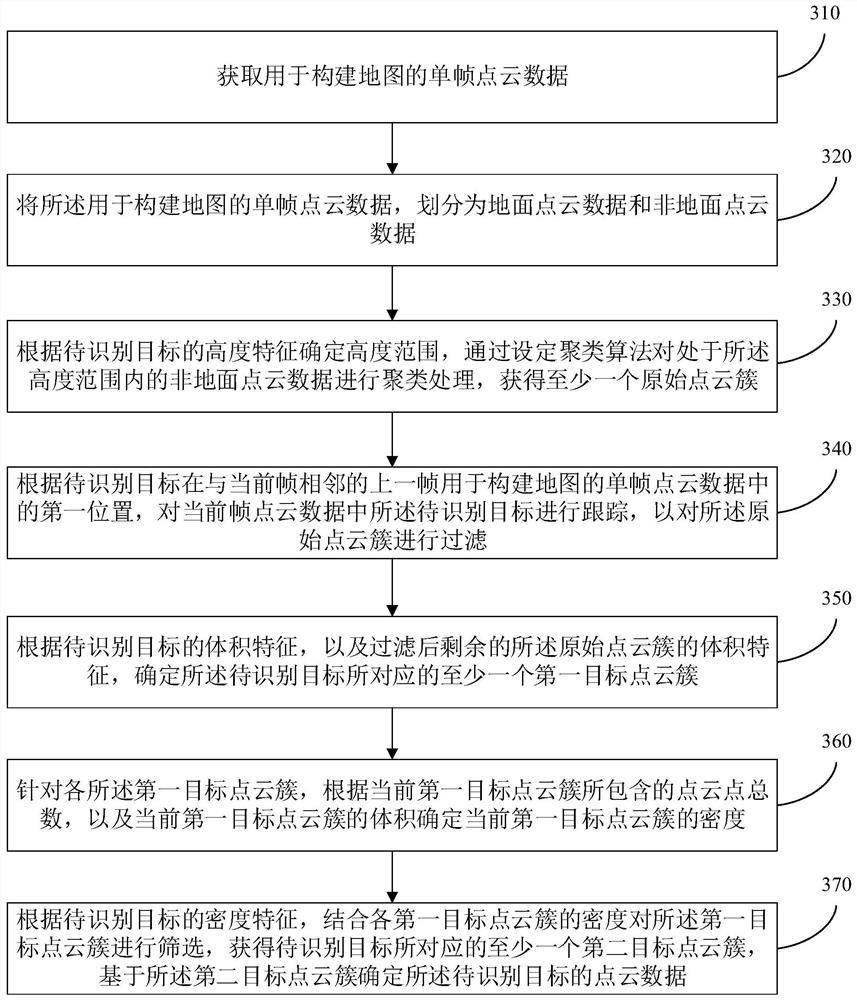
[0099] image 3 It is a flow chart of a target point cloud recognition method provided by Embodiment 3 of the present invention. This embodiment further optimizes the scheme on the basis of the above embodiments, specifically based on the fact that the target to be recognized is adjacent to the current frame The first position in the single-frame point cloud data used to build the map in the previous frame, and track the target to be identified in the current frame point cloud data, so as to quickly identify the target point cloud and reduce the candidates for subsequent further identification The amount of data in the point cloud, so as to achieve the purpose of improving the overall recognition efficiency and accuracy. The explanations of terms that are the same as or corresponding to those in the foregoing embodiments are not repeated here.
[0100] see image 3 The target point cloud recognition method provided in this embodiment specifically includes the following steps...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com