

Electric cylinder exoskeleton
An electric cylinder and exoskeleton technology, applied in the field of rehabilitation robots, can solve problems such as large lateral volume, achieve the effects of easy locking operation, enhance the effect of rehabilitation training, and realize the locking function
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
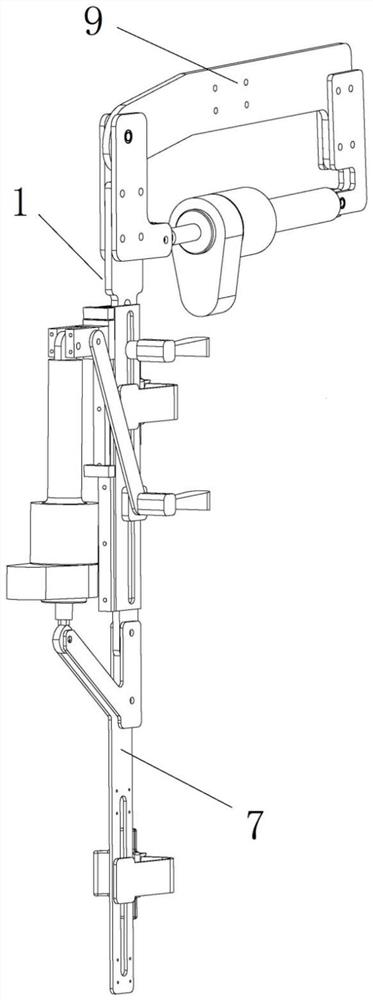
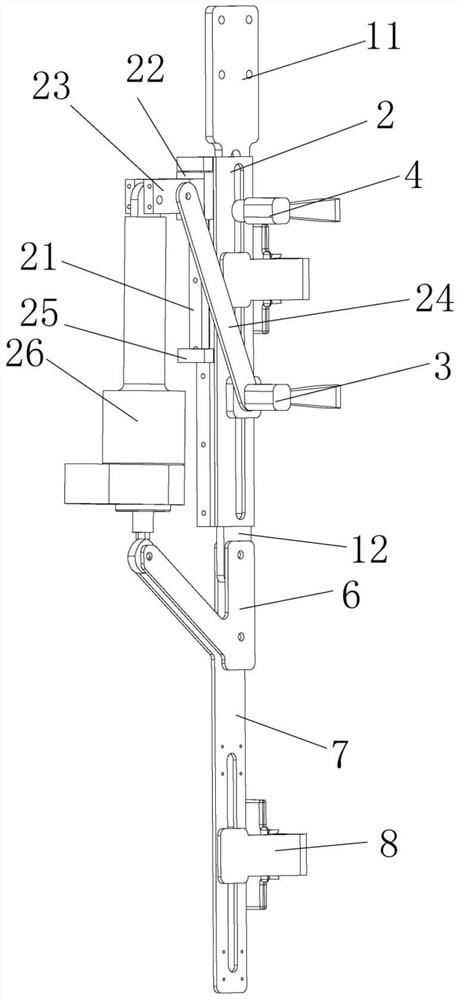
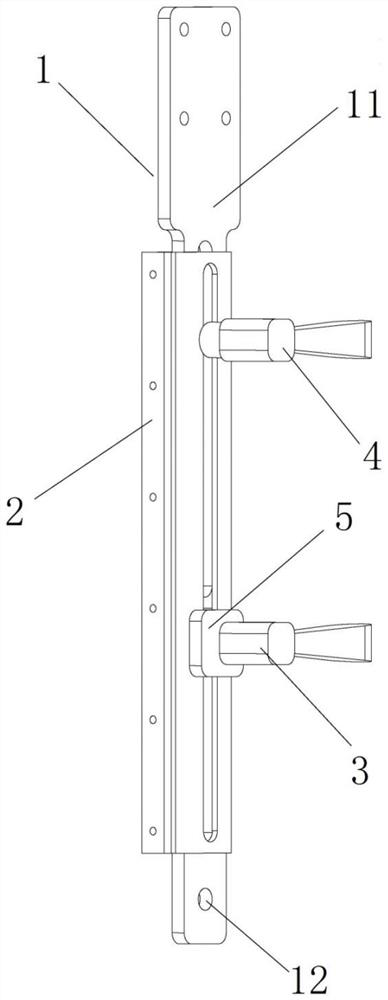
[0028] see figure 1 , this embodiment discloses an electric cylinder exoskeleton, including a thigh rod 1, a calf rod 7 and a hip joint connecting rod 9, such as Figure 2-4 As shown, the section of the thigh rod 1 is rectangular, and the thigh rod 1 is divided into two parts: an upper thigh rod 11 and a lower thigh rod 12 , and the upper thigh rod 11 and the lower thigh rod 12 are connected by a U-shaped sleeve 2 .
[0029] Such as Figure 5 As shown, the upper end of the upper thigh rod 11 is connected with a first electric cylinder connecting block 91, and the first electric cylinder connecting block 91 is connected with one end of the hip joint connecting rod 9 through a bearing. At the same time, the first electric cylinder connecting block 91 is connected with the output shaft of the first electric cylinder 92, and the other end of the first electric cylinder 92 is connected with the second electric cylinder connection block 93 through a bearing, and at the same time, t...
Embodiment 2
[0036] The general structure of the electric cylinder exoskeleton provided in this embodiment is the same as that of Embodiment 1, the difference is that a spacer 5 is added to the first push-pull quick clamp 3 and the second push-pull quick clamp 4, as figure 2 shown for increased clamping force.
[0037] The model of the electric cylinder used in the above embodiment is: maxon DC motor RE30GB 60W KL 2WE.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More