

Calibration device at tail end of orthopedic surgery robot
An orthopaedic surgery and calibration device technology, applied in surgical robots, surgical manipulators, etc., can solve the problems of complicated and complicated installation, delayed operation timing, waste of operation preparation time, etc., and achieve the effect of fast installation and good stability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
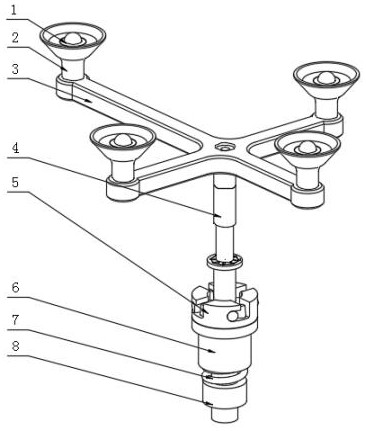
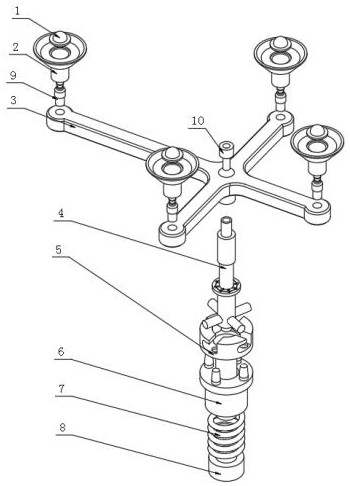
[0035] see Figure 1-2 , the present invention provides a technical solution: a calibration device for the end of an orthopedic surgical robot, including a calibration matrix base 3, a convex cylinder is fixedly installed on the lower side of the middle intersecting section of the calibration reflective ball member 1, and the middle intersection of the calibration matrix base 3 The section is provided with a countersunk threaded through hole, and the countersunk threaded through hole of the calibration matrix base 3 is provided with fastening screws 10, and the four ports of the calibration matrix base 3 are connected with four fixed support columns of the calibration matrix base 9. The four ports of the calibration matrix base 3 are fixed and supported by the four calibration matrix bases. The support column 9 is equipped with a calibration reflective ball base component 2, and a calibration reflective ball component 1 is arranged above the four calibration reflective ball bas...
Embodiment 2
[0041] see Figure 1-2 , the present invention provides a technical solution: a calibration device for the end of an orthopedic surgical robot, including a calibration matrix base 3, a convex cylinder is fixedly installed on the lower side of the middle intersecting section of the calibration reflective ball member 1, and the middle intersection of the calibration matrix base 3 The section is provided with a countersunk threaded through hole, and the countersunk threaded through hole of the calibration matrix base 3 is provided with fastening screws 10, and the four ports of the calibration matrix base 3 are connected with four fixed support columns of the calibration matrix base 9. The four ports of the calibration matrix base 3 are fixed and supported by the four calibration matrix bases. The support column 9 is equipped with a calibration reflective ball base component 2, and a calibration reflective ball component 1 is arranged above the four calibration reflective ball bas...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More