Vehicle-mounted autonomous navigation method based on carrier motion condition constraint and uniaxial rotation modulation
A technology of rotation modulation and navigation method, applied in the field of navigation, which can solve the problems of highly correlated error observability, reduced inertial error estimation accuracy, and lack of vehicle forward speed
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0099] The present invention will be further described below in conjunction with the accompanying drawings and embodiments.
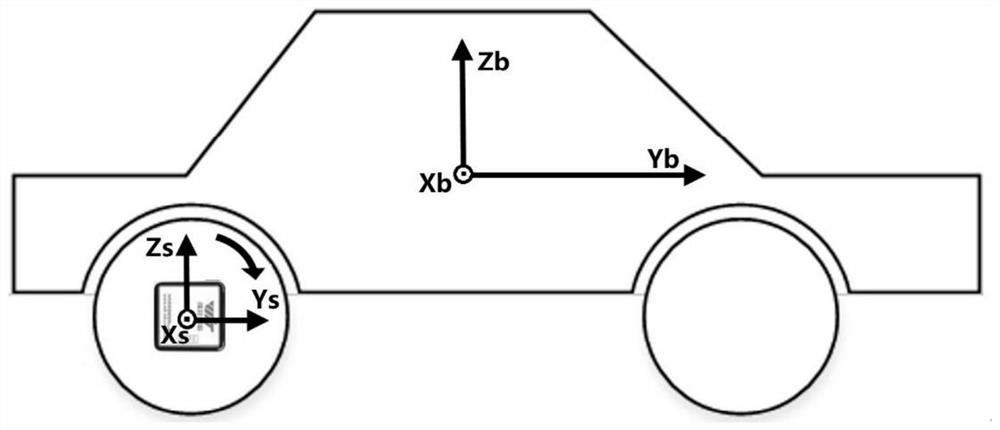
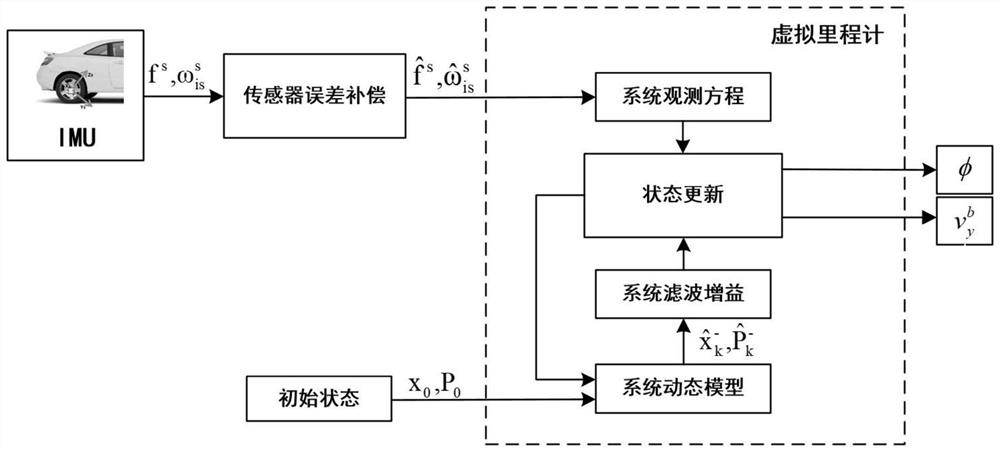
[0100] The schematic diagram of IMU rotation installed in the center of the wheel is as follows: figure 1 As shown, the schematic diagram of the virtual odometer based on the rotating IMU is as follows figure 2 shown.
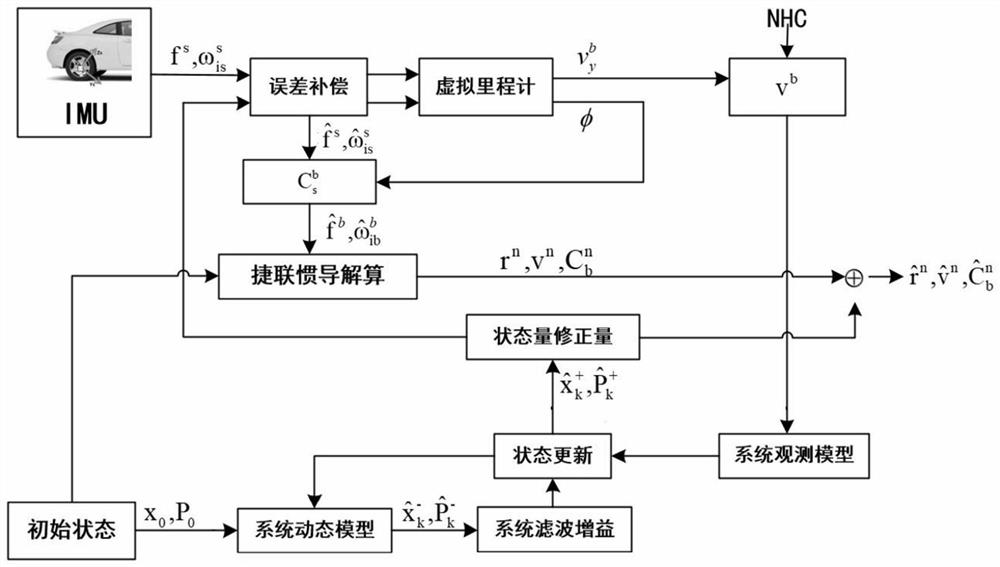
[0101] This embodiment provides a vehicle autonomous navigation method based on carrier motion constraints and single-axis rotation modulation, including the following steps:
[0102] Step 1. Calculate the forward speed and wheel rotation angle of the carrier based on the virtual odometer of the rotating IMU;
[0103] Install the IMU in the center of the wheel so that the IMU rotates with the movement of the carrier; o-x s the y s z s Represents the sensor coordinate system, o-x b the y b z b Represents the carrier coordinate system, where y b axis points to the front of the vehicle, z b axis perpendicular to y b axis pointin...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More