

Docking recovery integrated navigation method based on improved Gaussian distance iterative algorithm
An iterative algorithm and integrated navigation technology, applied in the field of navigation, can solve the problems of easy divergence, complex calculation process, and difficult practical application, and achieve the effect of good stability and accuracy and preventing huge errors.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0046] The present invention will be further described below in conjunction with the accompanying drawings and specific embodiments.
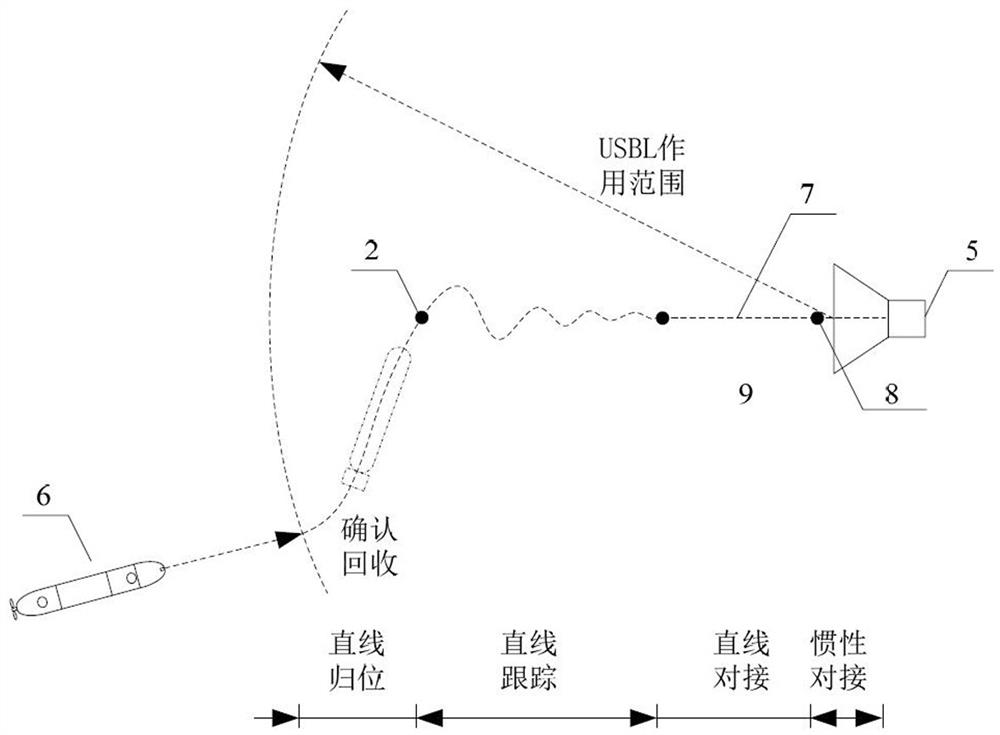
[0047] Such as figure 1 As shown, the straight-line homing stage 1, this stage means that the recovery device 5 uses the ultra-short baseline to locate the AUV autonomous vehicle 6, and reaches the straight-line tracking point 2, thereby entering the tracking process of the straight-line tracking stage 3; using the ultra-short baseline to provide The relative position and attitude information of the AUV is used to adjust the position of the AUV and the recovery device, so that the AUV can be sailed to the central axis 7 while consuming a relatively short distance from the docking axis, so that the attitude of the AUV is consistent with the central axis, thereby entering the heading Adjustment stage 4 is conducive to further real-time docking.
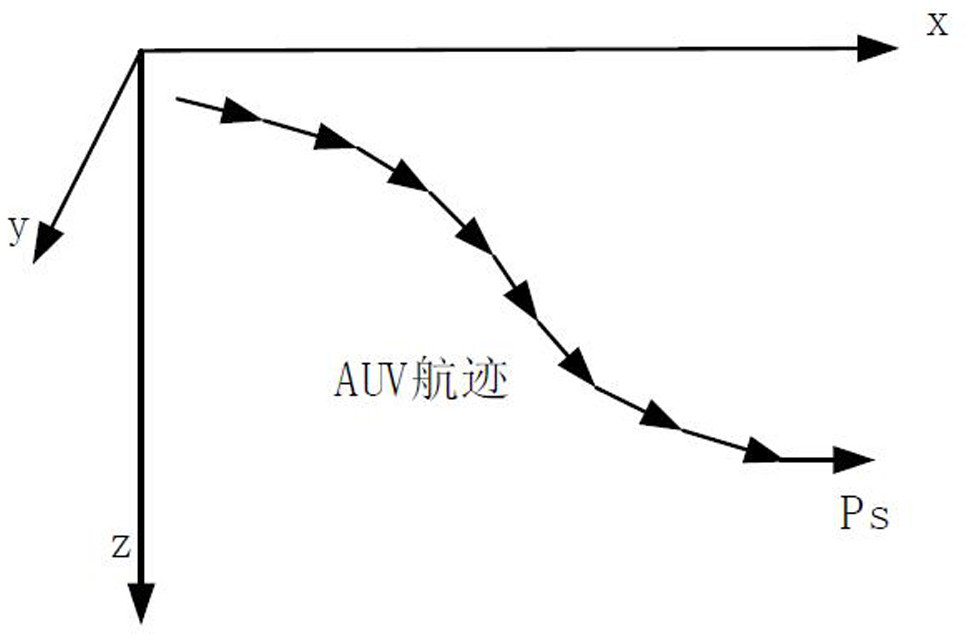
[0048] Such as figure 2 As shown, it is a segmented diagram of the overall track of the AUV in the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More