Pavement adhesion estimation method based on electro-hydraulic parameters
A technology of pavement adhesion and pavement adhesion coefficient, which is applied in the field of pavement adhesion coefficient and pavement utilization adhesion coefficient, and can solve the problems of high cost of special sensors, single working conditions, and high dependence on model accuracy.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0073] The present invention will be described in detail below in conjunction with the accompanying drawings.
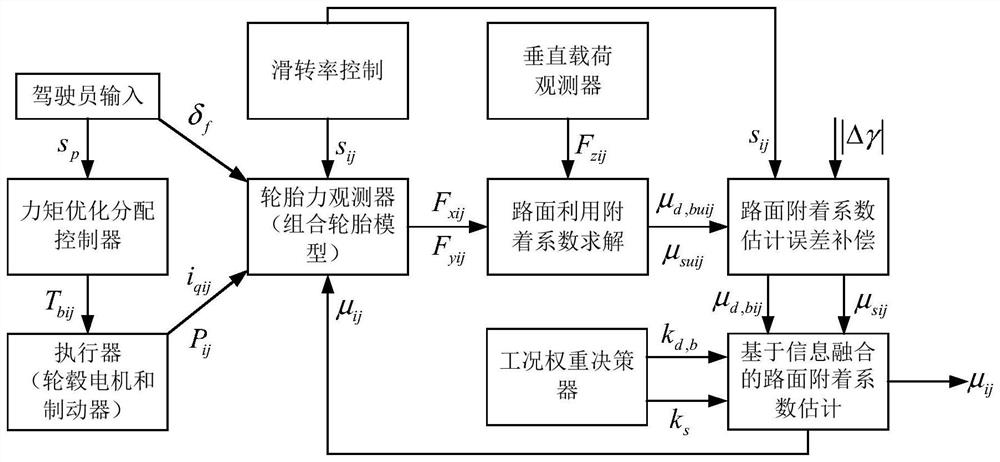
[0074] Such as figure 1 As shown, a road adhesion coefficient estimation method based on electrical and hydraulic parameters mainly estimates the speed and yaw angular velocity of each wheel center through the vehicle state observer, and combines the signal value detected by the angular velocity sensor to calculate the slip (shift) rate. The calculated value is connected with the combined tire model; the longitudinal and lateral acceleration estimated by the vehicle state observer is directly used for wheel vertical load estimation, and the vertical load observer is connected with the road surface adhesion coefficient solver; the distribution controller is based on moment optimization The determined demand torque of each wheel is connected to the chassis actuator; the electric and hydraulic parameter values detected by the actuator are connected to the combined tir...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More