

Flexible-driven hand function rehabilitation robot control system and control method
A rehabilitation robot and control system technology, applied in the direction of passive exercise equipment, equipment, sports accessories, etc., can solve the problems of lack of interactive training, poor robustness, high difficulty of control, etc., to achieve the effect of improving the rehabilitation effect and speeding up the rehabilitation process
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0061] The present invention will be described in detail below in conjunction with the accompanying drawings and specific embodiments. This embodiment is carried out on the premise of the technical solution of the present invention, and detailed implementation and specific operation process are given, but the protection scope of the present invention is not limited to the following embodiments.
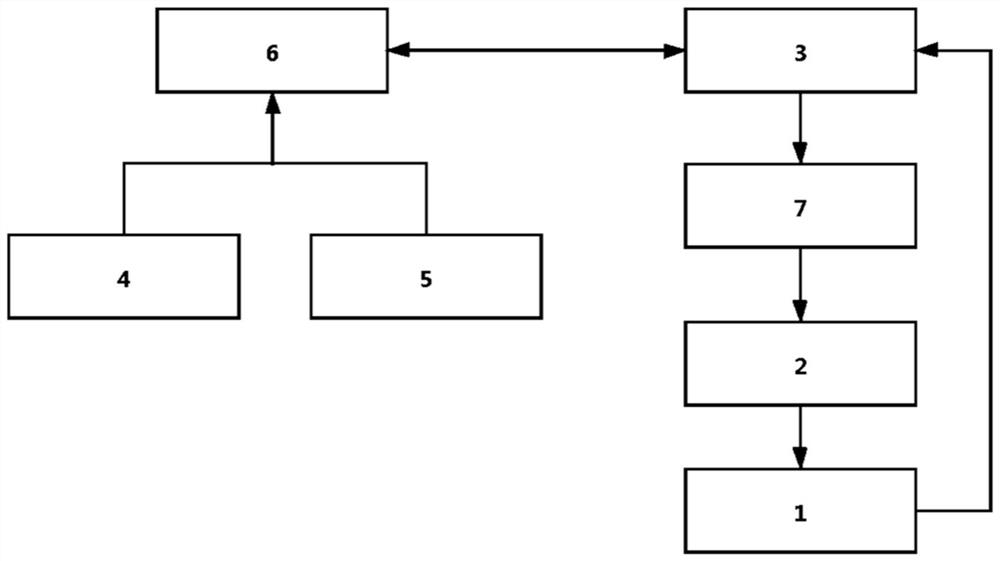
[0062] like figure 1 As shown in the figure, a flexible-driven hand function rehabilitation robot control system realizes the movement position control and grasping force control of five fingers, making the hand function rehabilitation robot drive the patient's hand for rehabilitation training more smoothly, stably and accurately, including The rehabilitation gloves 1, the Bowden wire transmission mechanism 2, the electric control unit 3, the myoelectric human-machine interface unit 4, the brain-electric human-machine interface unit 5, the rehabilitation training software 6 and the mo...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More