Unlock instant, AI-driven research and patent intelligence for your innovation.
A method and device for constructing a visual point cloud map
What is Al technical title?
Al technical title is built by PatSnap Al team. It summarizes the technical point description of the patent document.
A construction method and map technology, applied in the field of navigation and positioning, to achieve good adaptability and stability, avoid jumping problems, and reduce the effect of relocation occurrence probability
Active Publication Date: 2022-06-03
HANGZHOU HIKROBOT TECH CO LTD
View PDF0 Cites 0 Cited by
Summary
Abstract
Description
Claims
Application Information
AI Technical Summary
This helps you quickly interpret patents by identifying the three key elements:
Problems solved by technology
Method used
Benefits of technology
Problems solved by technology
In terms of input, before the robot runs, there is no special input. When it starts running, there are sensor raw data. In terms of output, the estimated pose and estimated map; that is, when building a new map model or improving a known map At the same time, positioning the robot on the map model is similar to the process of putting a person in an unfamiliar city and making the person familiar with the environment. It can be seen that the existing SLAM map construction usually couples the mapping problem and the positioning problem in the Together, the two influence each other
Method used
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
View more
Image
Smart Image Click on the blue labels to locate them in the text.
Viewing Examples
Smart Image
Click on the blue label to locate the original text in one second.
Reading with bidirectional positioning of images and text.
Smart Image
Examples
Experimental program
Comparison scheme
Effect test
Embodiment 1
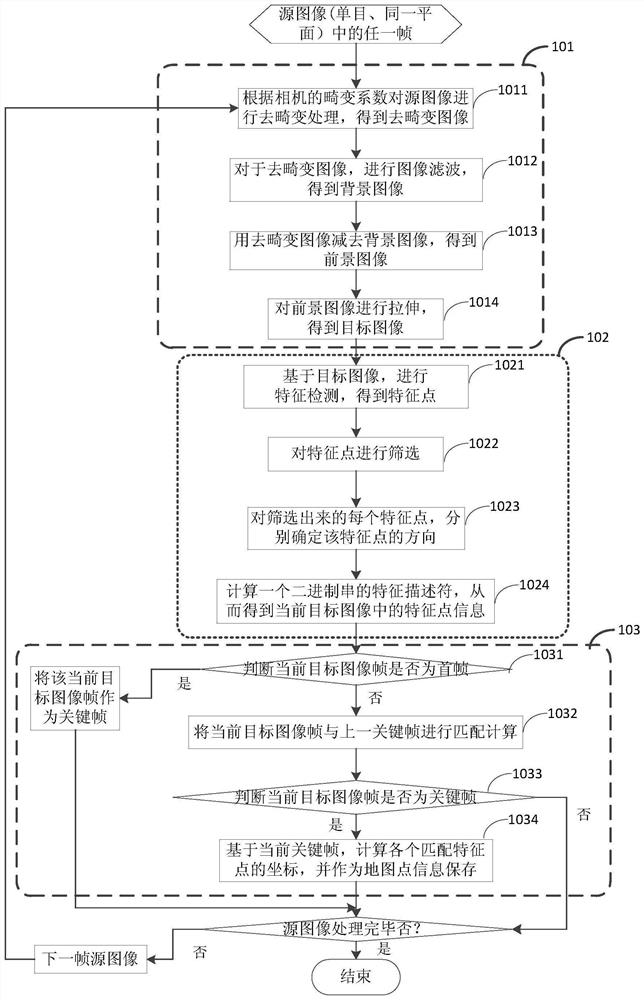
[0039] Step 1011, according to the distortion coefficient of the camera, the source image is de-distorted to obtain the de-distorted image I(u,
[0045] For example, if the maximum pixel value is 255, the inversion operation is: 255-1(u, v).
[0055]
[0057] Image preprocessing is beneficial to improve the contrast of the image, and in some environments with weak texture information, it is beneficial to improve the contrast of the image.
[0061] In step 1022, the FAST feature points are screened to effectively control the scale of the feature points. In order to ensure the feature points
[0062]
[0063] Wherein, the symbol indicates rounded down.
[0073] The key frame condition can also be one of the following conditions:
[0074] The spatial distance with the previous key frame is greater than the set second threshold;
[0075] The space angle between the previous key frame is greater than the set third threshold;
[0082] The z coordinate is the camera installation height. ...
Embodiment 2
[0093] Step 301, according to the distortion coefficient of the camera, the source image is subjected to de-distortionprocessing to obtain the de-distorted image I(u,
[0104] The number of matching feature points is greater than the set first threshold;
[0105] The spatial distance with the previous key frame is greater than the set second threshold;
[0106] The space angle with the previous key frame is greater than the set third threshold;
[0110]
[0112] Substitute the normalized plane coordinates of eight pairs of matching feature points, and the essential matrix can be solved. Among them, the current keyframe matches
[0129] where f is the focal length of the camera to convert the normalized plane coordinates into the imaging plane.
Embodiment 3
[0137] The specific processing is the same as step 301 to step 304,
[0141] The specific matching method is the same as step 307.
[0144] The number of matching feature points is greater than the set first threshold;
[0145] The spatial distance with the previous key frame is greater than the set second threshold;
[0146] The space angle between the previous key frame is greater than the set third threshold;
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More
PUM
Login to View More
Abstract
The present application discloses a method for constructing a visual point cloud map. The method includes: performing feature extraction on the source image frame collected in the space of the map to be built, obtaining feature points of the source image frame, and performing inter-frame tracking on the source image frame, Determine the key frame, match the feature points in the current key frame with the feature points in the previous key frame, get the matching feature points of the current key frame, calculate the spatial position information of the matching feature points in the current key frame, and match the feature points The spatial position information of is used as the map point information of the current key frame, wherein the point cloud formed by the set of map points of all key frames is the first visual point cloud map. The process of constructing the map in the present invention separates the mapping and positioning, effectively eliminates the mutual influence between the mapping and positioning, and has better adaptability and stability in complex and changeable environments.
Description
Method and device for constructing visual point cloud map technical field [0001] The present invention relates to the field of navigation and positioning, in particular, to a method for constructing a visual point cloud map. Background technique Building a map and positioning is a key technology in real-time positioning and mapping (SLAM) research, and building a map is a The prerequisite for positioning, the quality of the map directly affects the accuracy of positioning. The visual point cloud map is in the constructed map One, which describes the visual, pose and other information of the points in the environment through the three-dimensional point set in the space. Therefore, a visual point cloud is constructed. Maps require two types of data information: keyframes and map points, where keyframes describe the vision of points in the environment, and map points describe the vision of points in the environment. The pose of the point is described, and the set forme...
Claims
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More
Application Information
Patent Timeline
Application Date:The date an application was filed.
Publication Date:The date a patent or application was officially published.
First Publication Date:The earliest publication date of a patent with the same application number.
Issue Date:Publication date of the patent grant document.
PCT Entry Date:The Entry date of PCT National Phase.
Estimated Expiry Date:The statutory expiry date of a patent right according to the Patent Law, and it is the longest term of protection that the patent right can achieve without the termination of the patent right due to other reasons(Term extension factor has been taken into account ).
Invalid Date:Actual expiry date is based on effective date or publication date of legal transaction data of invalid patent.





 Login to View More
Login to View More  Login to View More
Login to View More