

Multi-unmanned aerial vehicle cooperative airway planning method based on improved sheep flock algorithm
A route planning and multi-UAV technology, applied in three-dimensional position/course control, vehicle position/route/height control, non-electric variable control, etc., can solve problems such as unsatisfactory convergence speed and unreliable optimal solution quality
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0108] The technical solution of the present invention will be described in detail below in conjunction with the accompanying drawings.
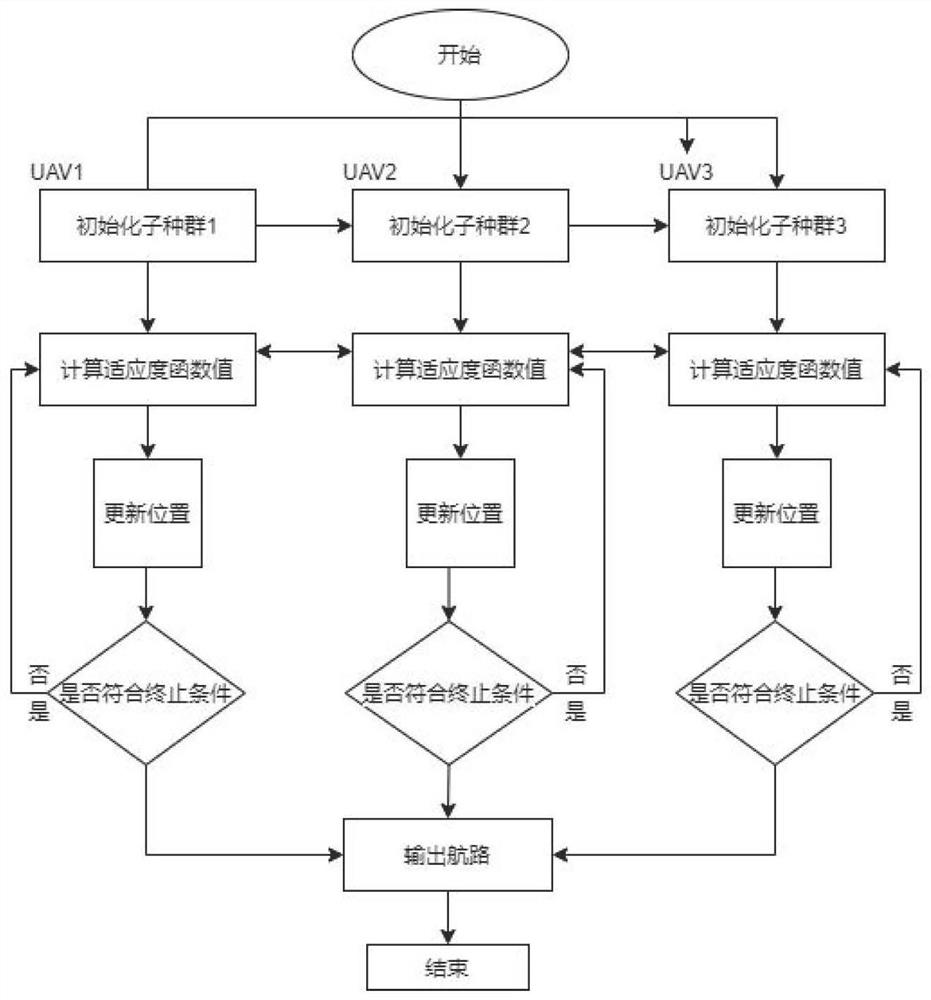
[0109] Such as figure 1 As shown, a multi-UAV collaborative route planning method based on the improved herd algorithm, specifically includes the following steps:
[0110] Step 1: Establish a three-dimensional environment for multi-UAV route planning;
[0111] A digital model is established by using a random function to simulate the mountain threat model function; the mountain threat model function is composed of the original digital terrain model and the threat equivalent terrain model;
[0112] The original digital terrain model is:
[0113]
[0114] Among them, x and y refer to the point coordinates on the horizontal projection plane; z 1 Refers to the height coordinates corresponding to the coordinate points on the horizontal plane; a, b, c, d, e, f, g are the terrain model coefficients;
[0115] The threat equivalent terrain mod...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More