

Wheel-legged robot leg structure and mobile robot
A wheel-legged robot and leg technology, applied in the field of robotics, can solve problems such as difficulty in meeting high obstacle-surmounting capability requirements, high motor peak torque, and limited available space for legs, reducing mass and rotational inertia, reducing impact loads, Satisfy the effect of a large workspace
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0033] The present invention will be described in detail below in conjunction with specific embodiments. The following examples will help those skilled in the art to further understand the present invention, but do not limit the present invention in any form. It should be noted that those skilled in the art can make several changes and improvements without departing from the concept of the present invention. These all belong to the protection scope of the present invention.
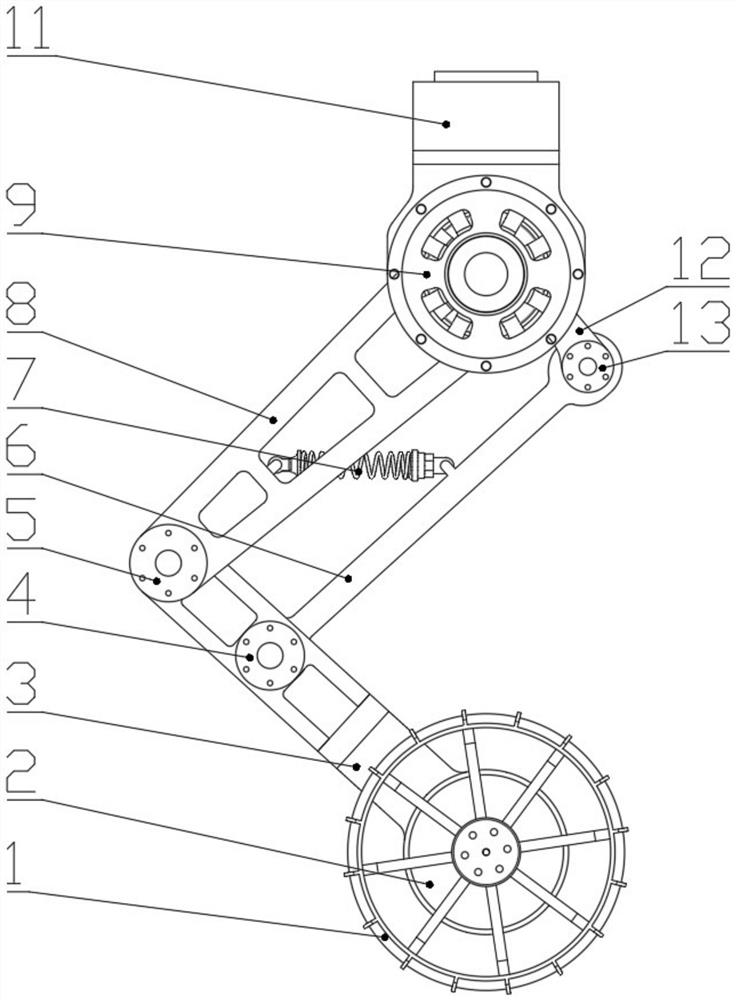
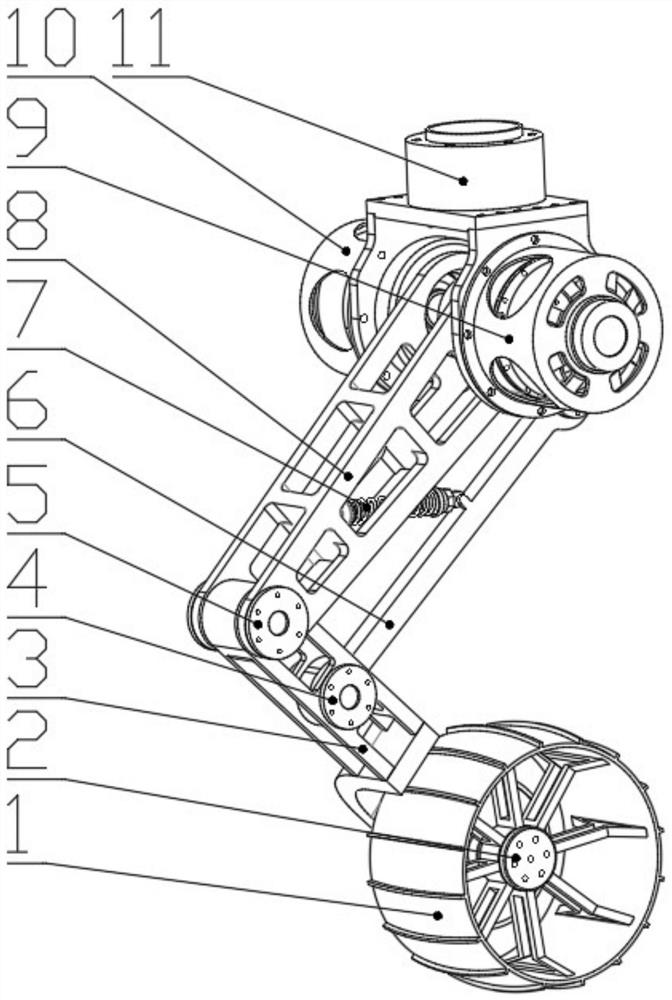
[0034] Such as figure 1 As shown, the present invention provides a leg structure of a wheel-legged robot, including a wheel 1, a wheel drive motor 2, a shank link 3, a second knee link 4, a first knee link 5, a second shank transmission Connecting rod 6, buffer energy storage spring 7, thigh connecting rod 8, calf drive motor 9, thigh drive motor 10, leg base support 11, first calf transmission link 12 and calf transmission connector 13.
[0035] Wherein, one end of the shank connecting rod 3 is connec...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More