

Multi-heterogeneous unmanned aerial vehicle task allocation method based on improved genetic algorithm
An improved genetic algorithm and task allocation technology, applied in the field of multi-heterogeneous UAV task allocation based on improved genetic algorithm, can solve problems such as low solution accuracy, low task allocation efficiency, and difficult to solve load balancing problems
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0053] In order to make the technical solutions and advantages of the present invention more clear, the technical solutions in the embodiments of the present invention are clearly and completely described below in conjunction with the drawings in the embodiments of the present invention:
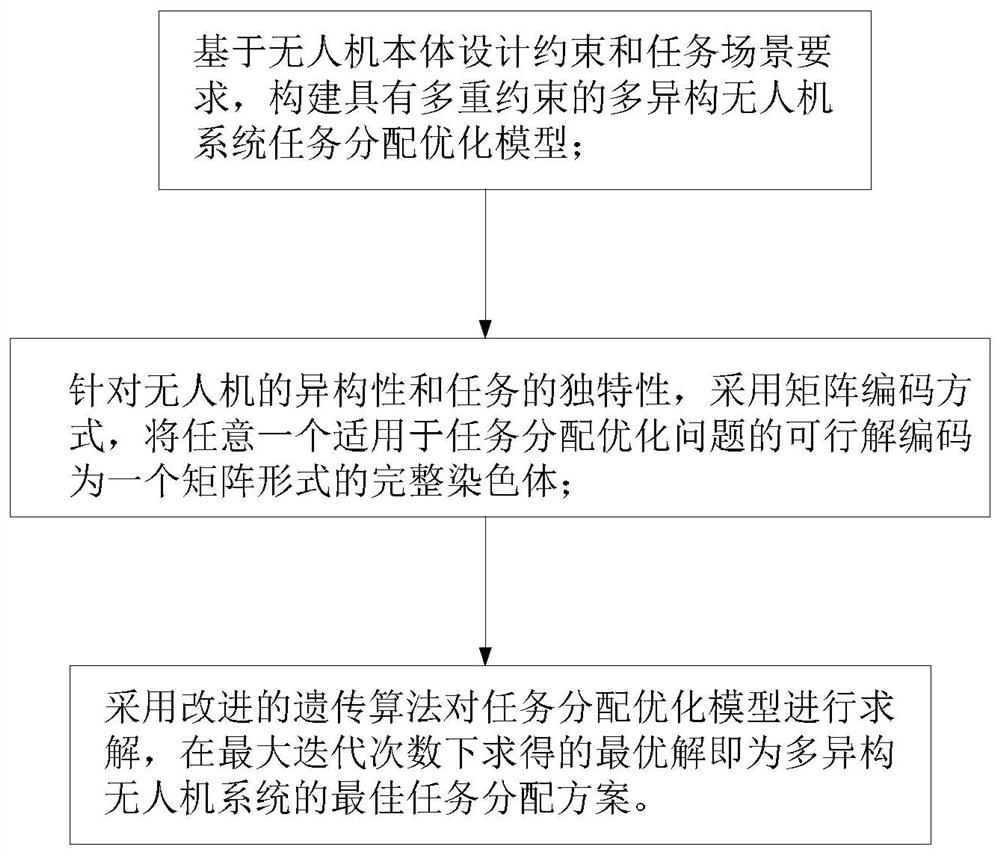
[0054] figure 1 It is a flowchart of the method of the present invention; a method for allocating tasks of multi-heterogeneous unmanned aerial vehicles based on an improved genetic algorithm, comprising the following steps:
[0055] S1: Based on the UAV ontology design constraints and mission scenario requirements, construct a multi-constraint multi-heterogeneous UAV system task allocation optimization model;
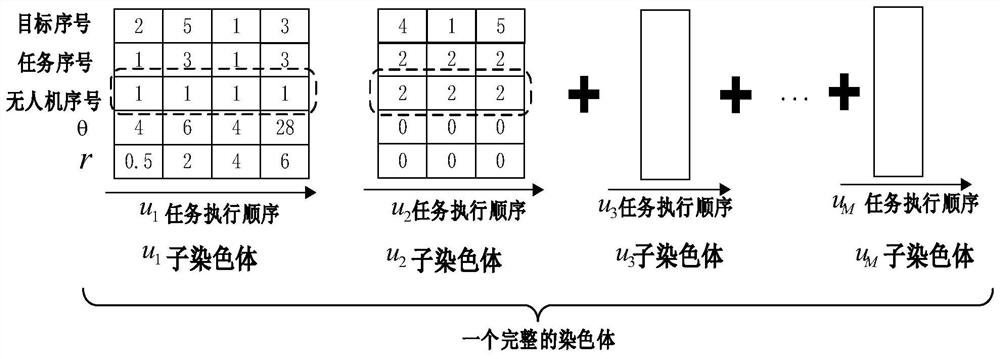
[0056] S2: Aiming at the heterogeneity of UAVs and the uniqueness of tasks, a matrix encoding method is used to encode any feasible solution suitable for task allocation optimization problems into a complete chromosome in the form of a matrix;
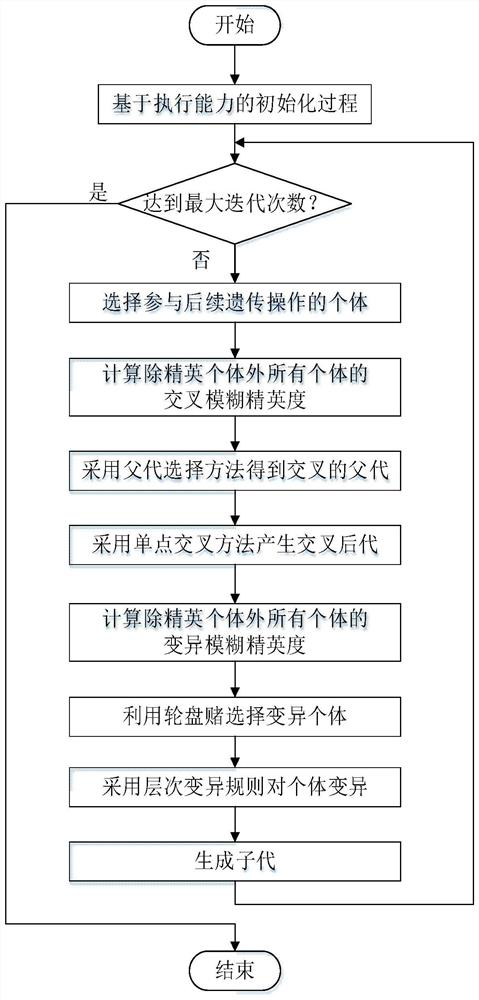
[0057] S3: The improved genetic algori...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More