

3D point cloud semantic segmentation method under bird's-eye view coding view angle
A semantic segmentation, bird's-eye view technology, applied in the field of computer vision, can solve the problem of high sparsity of point cloud scene understanding data, difficult to process large-scale point clouds in real time, and insufficient local feature robustness, etc. Effects of perceptual field, increased perceptual field, strong feature extraction and recognition ability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
[0066] The present invention provides a 3D point cloud semantic segmentation method under the bird's-eye view encoding perspective, including the training of the network model and the operation steps of the model.
[0067] 1. Training network model
[0068] To train the 3D point cloud semantic segmentation network model under the coding perspective of the bird's-eye view, sufficient point cloud data is first required. Each frame of point cloud scene samples should contain XYZ, reflectivity, and semantic category information to which each point belongs. Take the SemanticKITTI outdoor lidar point cloud dataset as an example. A total of 15,000 frame scene point clouds are used as the training set, and 3,000 real point clouds are used as the verification set.
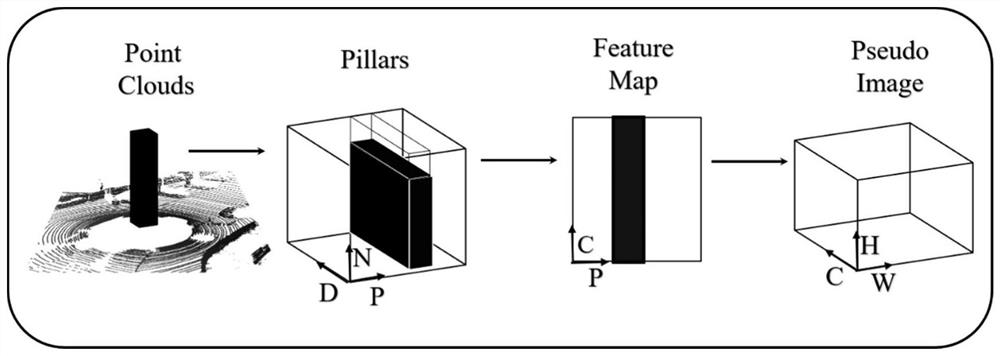
[0069] After obtaining enough point cloud data sets, firstly, each frame of point cloud needs to be coded from the perspective of the bird’s-eye view to become grid voxels under the bird’s-eye view, and then use the simpl...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More