

A snake-shaped water surface rescue robot and its control method
The technology of a rescue robot and a control method is applied in the field of serpentine water surface rescue robot and its control, which can solve the problems of unguaranteed self-safety, reduced staff strength, low degree of automation, etc., so as to improve rescue working conditions and improve timeliness. The effect of high degree of stability and automation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0025] The present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments.
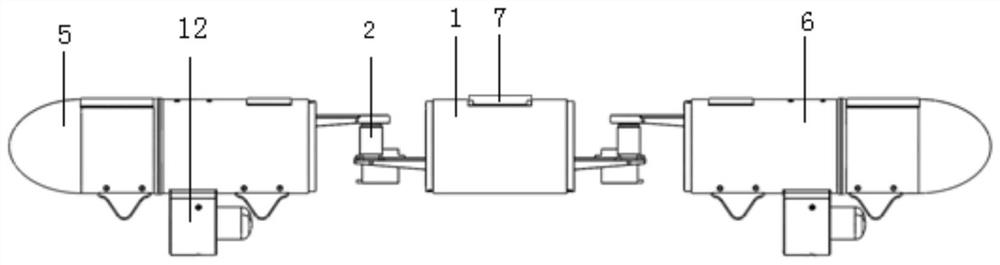
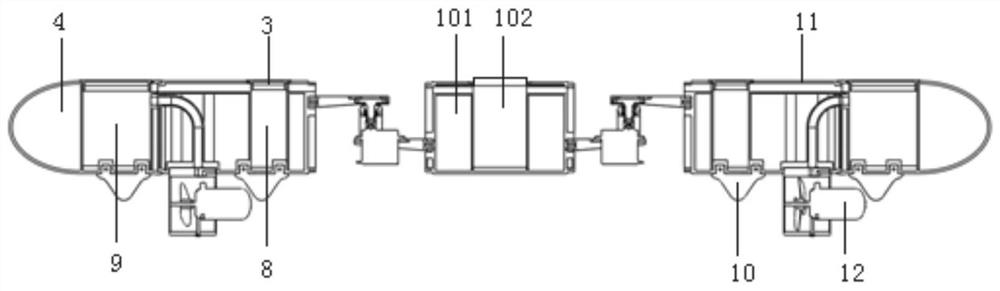
[0026] Such as Figure 1 to Figure 5 As shown, a snake-shaped surface rescue robot includes a front segment 5 of a snake-shaped body, a middle segment 1 of a snake-shaped body, and a rear segment 6 of a snake-shaped body. The front segment 5 of the serpentine body is connected with the rear segment 6 of the serpentine body.
[0027] The middle section 1 of the serpentine body includes a middle shell, the top of the middle shell is provided with a middle hatch 7, and the middle hatch 7 is provided with a start switch, and a middle sealed compartment 101 is formed inside the middle shell, and is sealed in the middle. Both sides of the cabin 101 are provided with line pipeline ports, and the middle part of the middle sealed cabin 101 is the controller cabin 102. The controller, buzzer, wireless communication module and image transmission module ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More