

Multi-rotor unmanned aerial vehicle trajectory tracking composite control method
A multi-rotor unmanned aerial vehicle and multi-rotor unmanned technology, applied in attitude control, non-electric variable control, control/regulation system, etc., can solve problems that are not conducive to controller design and practical application, difficult trajectory tracking algorithm, multi-rotor High-order problems of UAV model
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0057] Hereinafter, embodiments of the present invention will be described with reference to the accompanying drawings. In the following description, the same blocks are denoted by the same reference numerals. With the same reference numerals, their names and functions are also the same. Therefore, its detailed description will not be repeated.
[0058] In order to make the object, technical solution and advantages of the present invention clearer, the present invention will be further described in detail below in conjunction with the accompanying drawings and specific embodiments. It should be understood that the specific embodiments described here are only used to explain the present invention, but not to limit the present invention.
[0059] Specific embodiments of the present invention will be described in detail below in conjunction with the accompanying drawings.
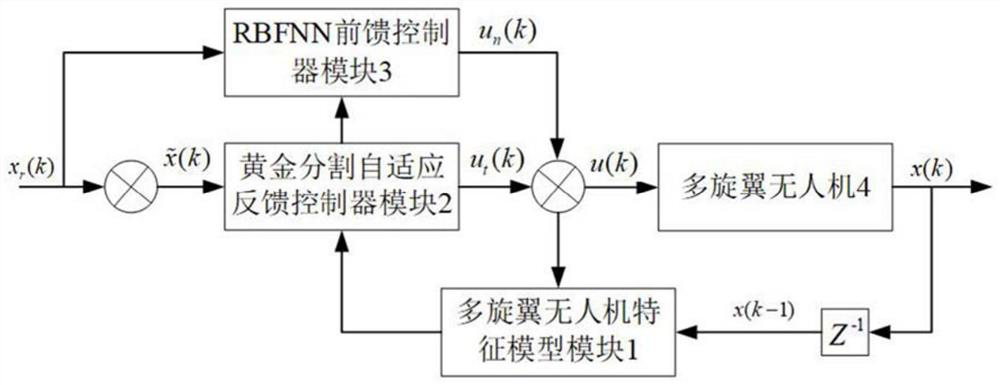
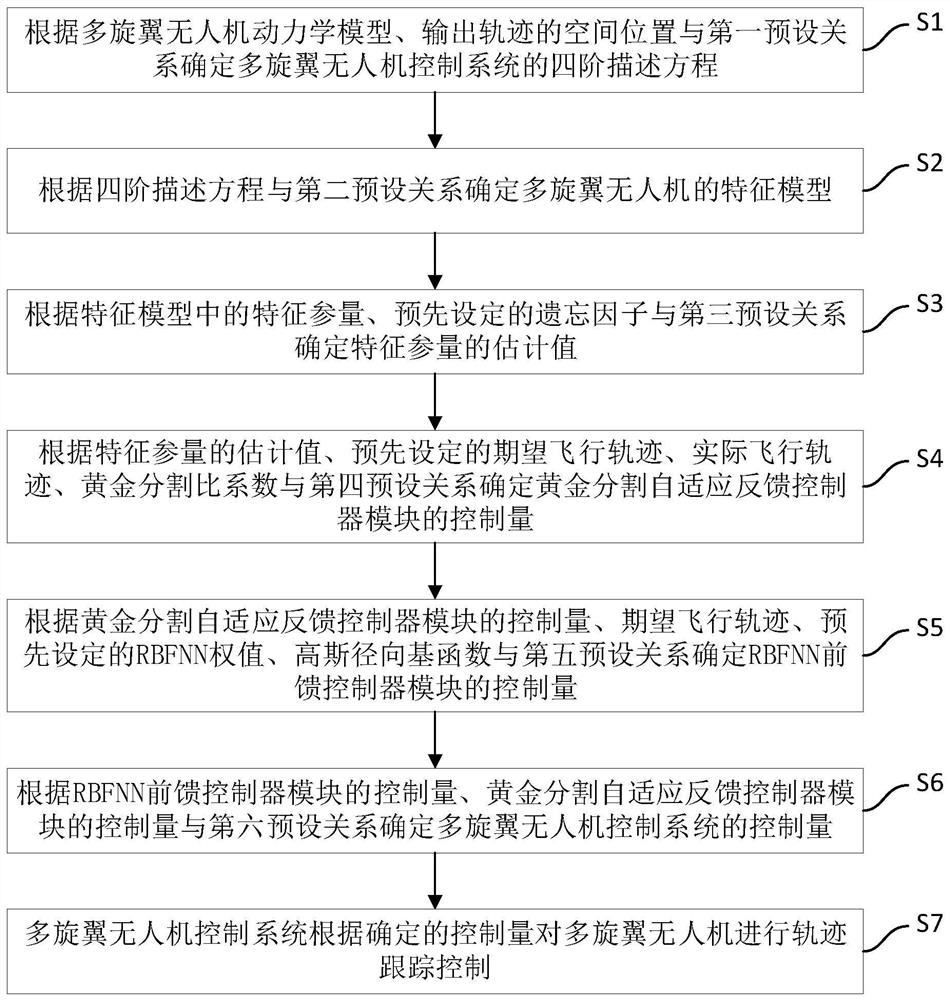
[0060] figure 1 It is the process flow of the multi-rotor UAV trajectory tracking compound control meth...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More