

Whole vehicle drive-by-wire system and control method for unmanned vehicle
A technology for unmanned vehicles and vehicle lines, which is applied to vehicle components, braking safety systems, circuits or fluid pipelines, etc., can solve problems such as unmanned heavy-duty vehicles, and improve dynamic control capabilities and reliability. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
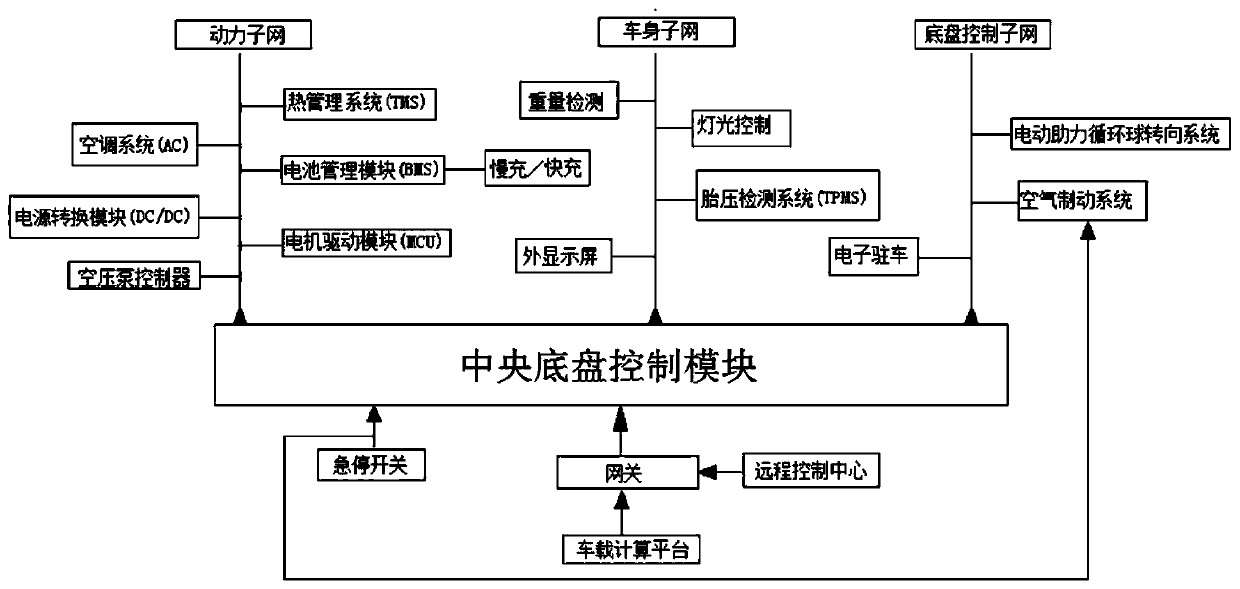
[0022] refer to figure 1 As shown, this embodiment is a vehicle-by-wire control system for an unmanned vehicle, including a central chassis control module, an emergency stop switch connected to the central chassis control module, and an air brake system connected to the emergency stop switch;
[0023] The central chassis control module is connected to the power subnetwork used to execute the electronic braking of the vehicle, the air brake system used to implement the mechanical brake of the vehicle, and the parking system for the electronic braking of the vehicle or the parking system when the mechanical brake fails through the CAN bus interface. Braking electronic parking system.
[0024] The power subnet includes air conditioning system, power conversion module, air compressor controller, thermal management system (TMS), battery management module (BMS), and motor drive module (MCU). The battery management module is connected with a fast charging / slow charging module to sup...
Embodiment 2
[0040] This embodiment is a vehicle-by-wire control method for an unmanned vehicle, comprising the following steps:
[0041] 1) The emergency stop switch is connected to the central chassis control module. When the vehicle is out of control, the emergency stop switch is manually operated. After the central chassis control module detects the emergency stop information of the emergency stop switch, it sends a parking command;
[0042] 2) The central chassis control module is connected to the power subnetwork, air brake system and electronic parking system through the CAN bus interface. After the power subnetwork receives the parking command, it executes the electronic braking of the vehicle; after the air brake system receives the parking command, it Execution of the mechanical brakes of the vehicle;
[0043] 3) When the electronic brake or mechanical brake fails, or when the electronic parking system detects that the vehicle speed drops to zero; the electronic parking system ex...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More