Quadrotor unmanned aerial vehicle attitude control method considering inertia uncertainty
A quadrotor UAV, uncertainty technology, applied in attitude control, non-electric variable control, control/regulation system and other directions, can solve problems such as poor interference processing ability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
[0036] The present invention will be described in detail below in conjunction with the drawings and embodiments.
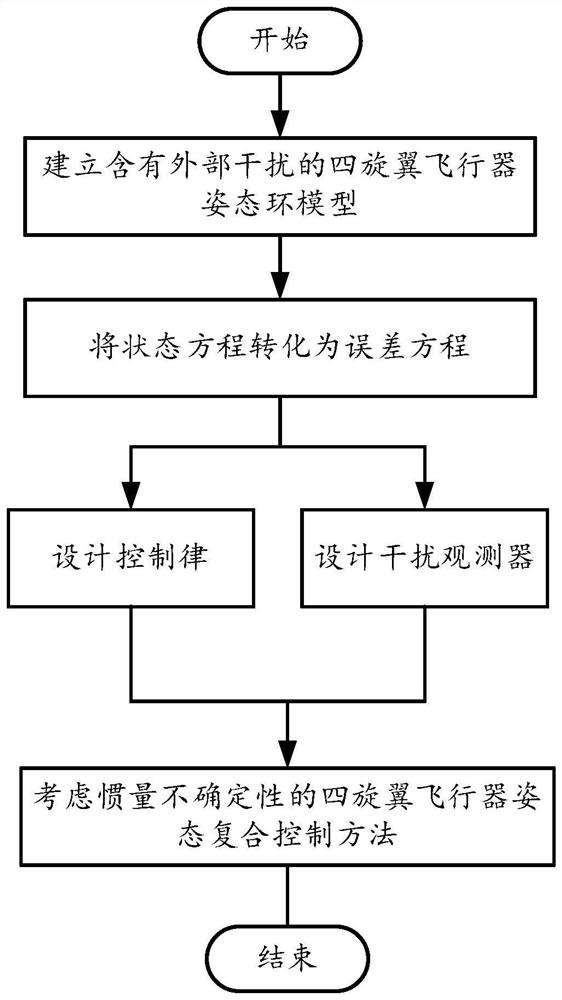
[0037] Such as figure 1 As shown, the design steps of a high-precision attitude control method for a quad-rotor UAV considering the uncertainty of inertia according to the present invention are as follows: First, establish a quad-rotor UAV attitude loop model containing external interference; The attitude loop model of the rotary-wing UAV is transformed into an error equation; again, the four-rotor UAV attitude control law is designed; then, the interference observer is designed using the error equation; finally, the interference estimate is compensated through the feedforward channel, and Compound with control law.
[0038] The specific implementation steps are as follows:
[0039] The first step is to establish a quad-rotor UAV attitude loop model with external interference as follows:
[0040]
[0041]
[0042]
[0043] Among them, J 0x Indicates the moment of inerti...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More