

Human body action acquisition method based on inertial sensor without standard posture correction
An inertial sensor and acquisition method technology, applied in the field of greenhouses, can solve the problems that the experiment cannot continue and the operation is complicated
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0034] The technical solutions in the embodiments of the present invention will be clearly and completely described below in conjunction with the accompanying drawings in the embodiments of the present invention. Obviously, the described embodiments are only some of the embodiments of the present invention, not all of them. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without making creative efforts belong to the protection scope of the present invention.
[0035] A method for collecting human body movements based on an inertial sensor without standard posture correction, the specific steps of the collection method are:
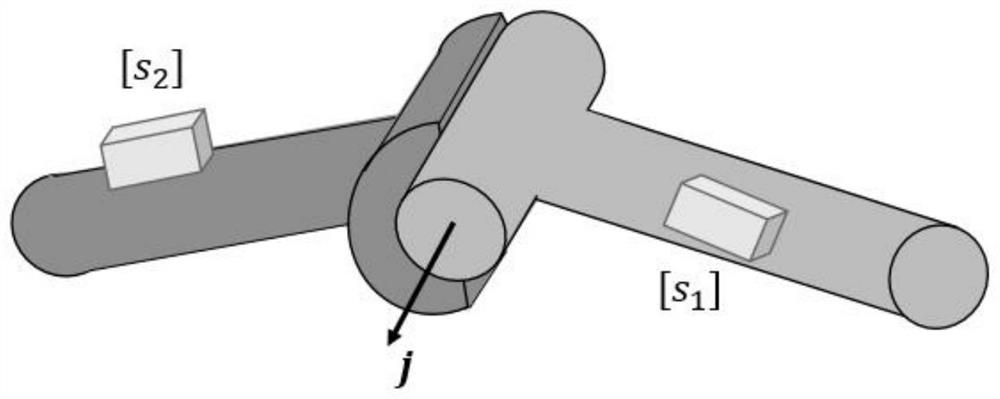
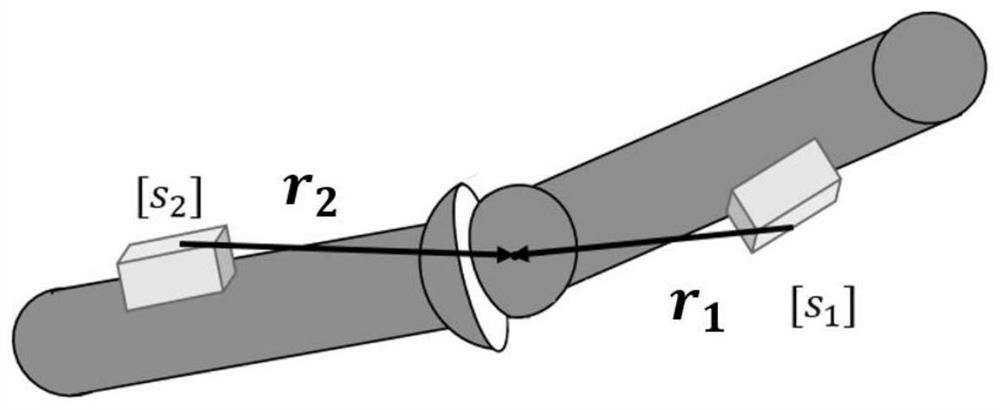
[0036] Step 1: Install the IMU and establish joint physiological kinematic constraints;
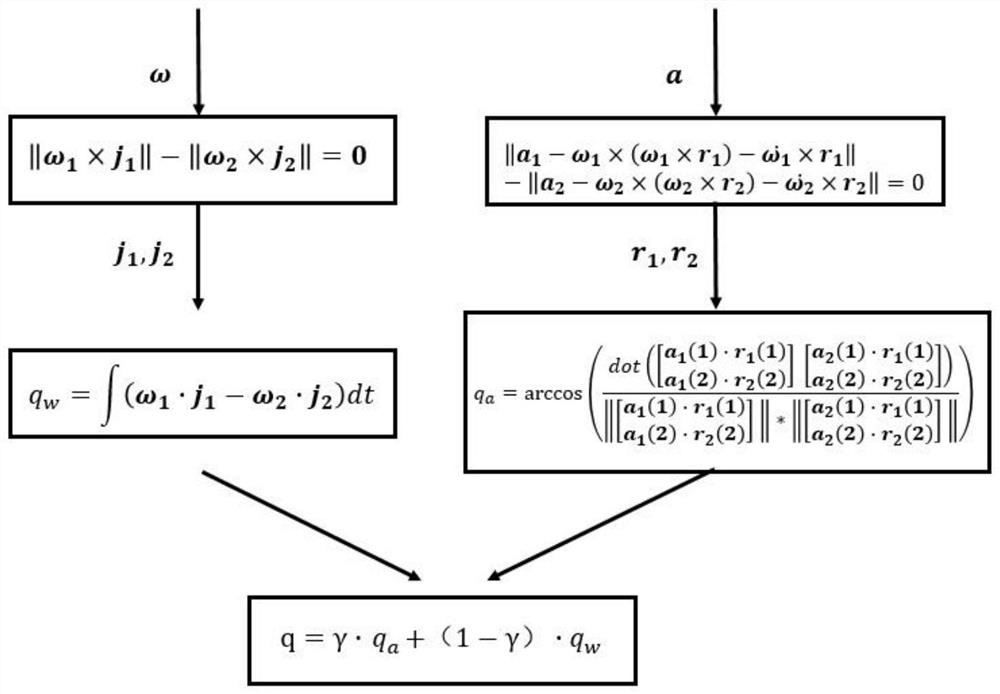
[0037] Step 2: Using the IMU in step 1, when the number of sampling points of the IMU exceeds 100, run the optimization program according to the constraint equation, and use the Gauss-Newton met...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More