

Monocular vision robot rapid tracking method based on road correction
A monocular vision and robot technology, applied in instruments, computer parts, image data processing, etc., can solve the problems of complex road image modeling and large calculation amount, and achieve high engineering application value and simple operability. , the effect is obvious
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0032] The present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments.
[0033] In the present invention, the robot adopts the OV7620 camera as the visual sensor to collect road images, uses Freescale's K60 chip as the core of the control system, and the steering mechanism adopts a two-wheel differential structure, and two DC motors drive the differential structure to realize forward and steering .
[0034] In order to further illustrate the technical content of the present invention, the innovative points have good effects, and the following describes in detail in conjunction with the embodiments and accompanying drawings.
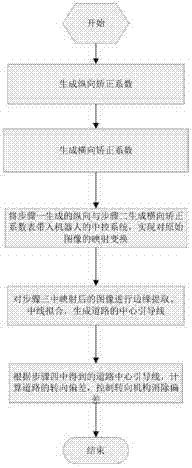
[0035] The robot fast tracking flow chart is as follows: figure 1 shown. The specific steps are as follows:
[0036] Step 1: Generate vertical correction coefficients.
[0037] The description is now made with the number of sampling lines H=15, the accuracy of sampling correction can be ch...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More