

Intelligent vehicle speed decision-making method based on deep reinforcement learning and simulation method thereof
A technology of reinforcement learning and decision-making methods, applied in neural learning methods, design optimization/simulation, biological neural network models, etc. and other problems to achieve the effect of easy verification
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
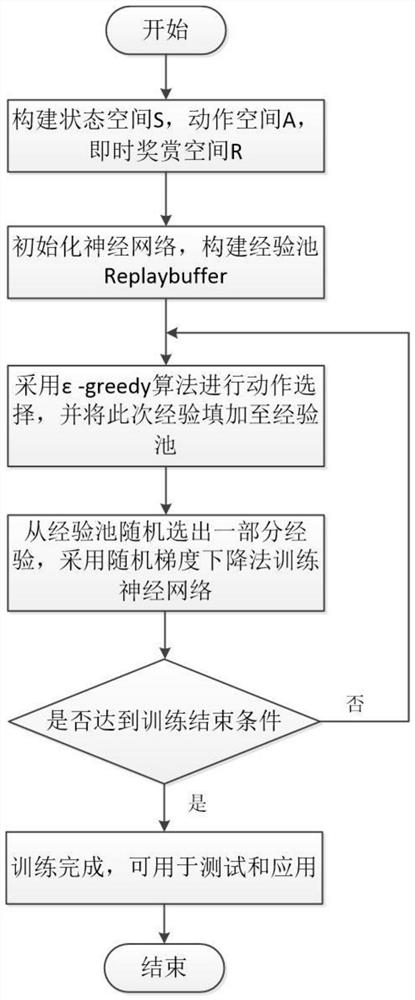
[0067] Such as figure 1 As shown, a smart car speed decision method based on deep reinforcement learning includes the following steps:
[0068] Step 1. Construct state space S, action space A, and immediate reward space R
[0069] Markov decision model, which can be represented by a quaternion , which are state space, action space, state transition function, and immediate reward. In this method, no state transition function is involved, so only the state space S, the action space A, and the immediate reward space R need to be constructed.
[0070] The composition of the state space includes the state of the smart car (this car) and the state of other cars. The state space is constructed as follows:
[0071] S=[s ego ,s 1 ,s 2 ,...,s n ]
[0072] where s ego Indicates the state of the vehicle, s 1 -s n Indicates the status of other vehicles in the current traffic scene, and n indicates the number of other vehicles.
[0073] Regardless of whether it is the car or anot...
Embodiment 2
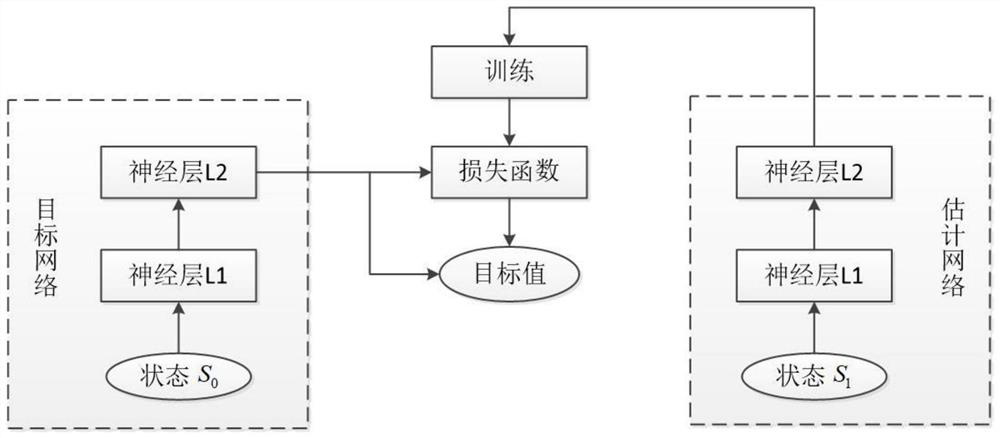
[0113] A simulation method of a smart car speed decision-making method based on deep reinforcement learning, which is based on a DQN (Deep-Q-Learning) simulation system built by matlab automatic driving toolbox for simulation experiments, including the following steps:
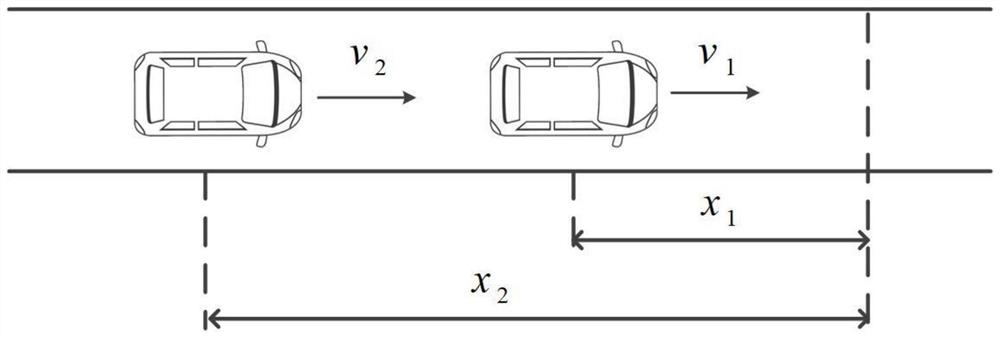
[0114] First build the road environment for automatic driving decision-making, which is realized by the DrivingScenario Designer in the matlab automatic driving toolbox. The speed decision-making of the smart car proposed in the present invention is mainly aimed at traffic intersections without signal lights, so the first step is to add two vertical lines in the scene. Intersecting roads with a length of 100 meters are used as road objects in the driving environment, where each road is a two-way double-lane, and the width of each lane is 4.4 meters. The second step is to add vehicle objects, including the own car (smart car) and other cars. The starting position and target position of the own car are fixed, mai...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More