

Intelligent flexible driving device integrating distributed sensing and cooperating with actuating units, and application
A driving device and sensing unit technology, applied in the field of intelligent robots, can solve the problems of low control accuracy, difficult to achieve intelligence, flexibility, complex structure, etc., and achieve the effect of global robust acquisition
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0036] Describe the present invention in detail below in conjunction with embodiment and accompanying drawing. The embodiment is based on the specific implementation carried out on the premise of the technical solution of the present invention, and provides detailed implementation methods and processes. However, the protection scope of the claims of the present application is not limited to the description of the following embodiments.
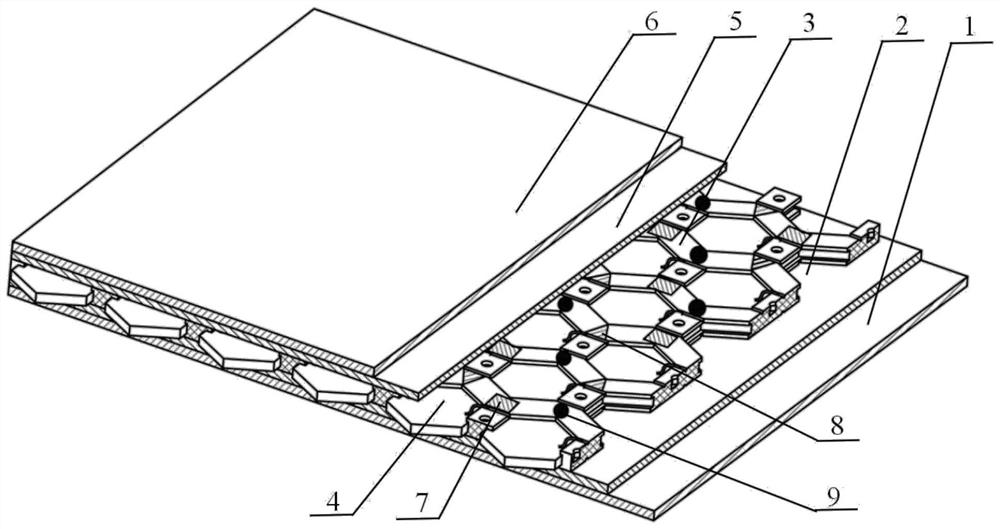
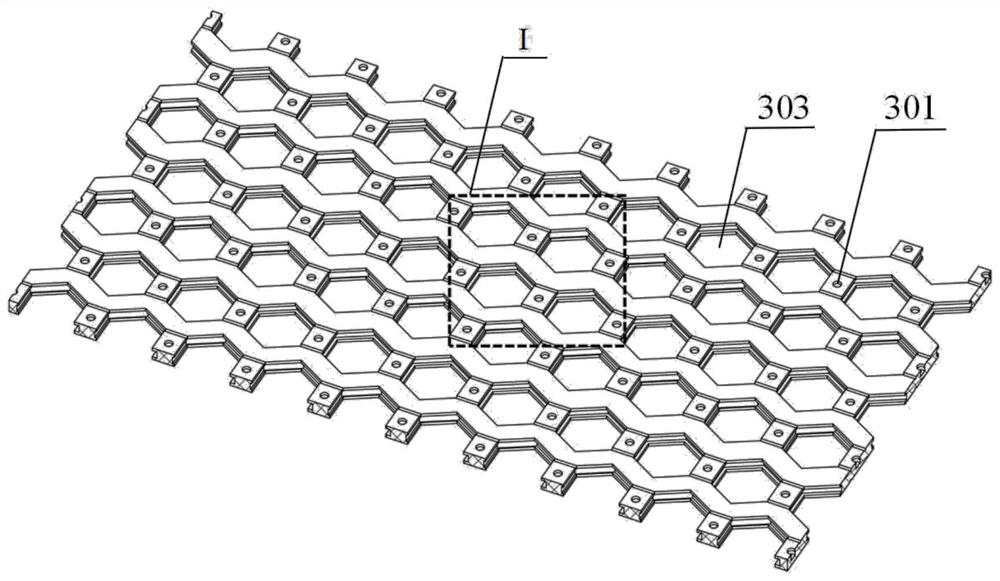
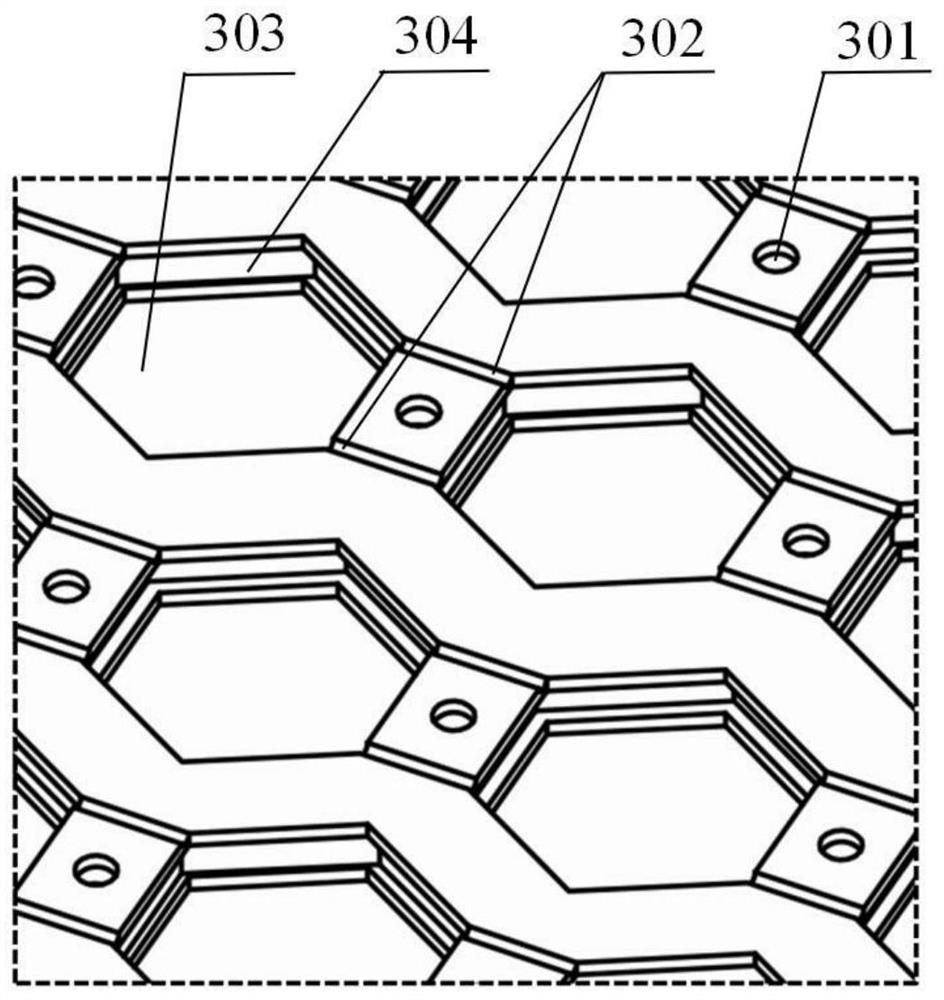
[0037] The present invention is an intelligent flexible drive device that integrates distributed sensing and cooperative actuation units (for details, see Figure 1-6 ), including outer layer 1, sub-outer layer 2, middle layer 3, actuating unit 4, sub-inner layer 5, inner layer 6, displacement sensing unit 7, myoelectric sensing unit 8, and pressure sensing unit 9. Three kinds of numerous sensors are used to form an array through distribution topology optimization, with a specific five-layer material, and an array of actuation units is set at...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More