

Visual pose real-time estimation method based on digital image map and feature point tracking
A technology for digital image and pose estimation, applied in the field of visual navigation, can solve the problems of inability to meet pose estimation, time-consuming and so on
Active Publication Date: 2020-11-10
XIDIAN UNIV
View PDF8 Cites 4 Cited by
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Among them, feature point detection and feature point matching are the most time-consuming links. If the ground image (720 pixels × 576 pixels) and the digital image map (4000 pixels × 4000 pixels) are captured by the drone, the SURF (Speeded Up Robust Features) algorithm is used. The detection and matching of feature points takes about 5 seconds from the detection of feature points to the completion of the matching process, which cannot meet the needs of pose estimation by frame-by-frame matching of ground images captured by drones and large digital image maps
Method used
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
View moreImage
Smart Image Click on the blue labels to locate them in the text.
Smart ImageViewing Examples

Examples
Experimental program
Comparison scheme
Effect test
specific Embodiment approach
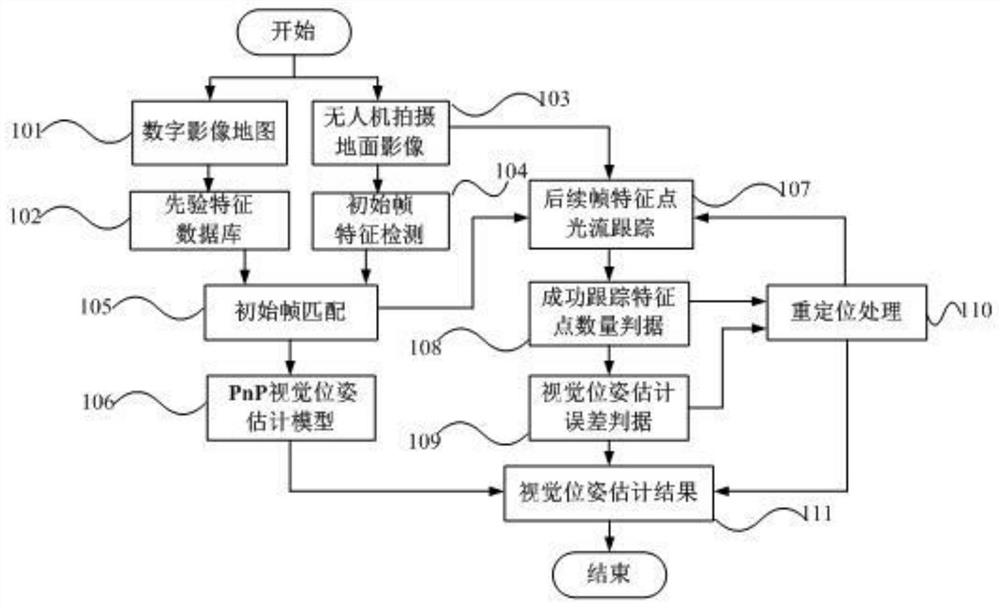
[0110] Step 101: Obtain a priori digital image map (4000 pixels×4000 pixels);
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More PUM
 Login to View More
Login to View More Abstract
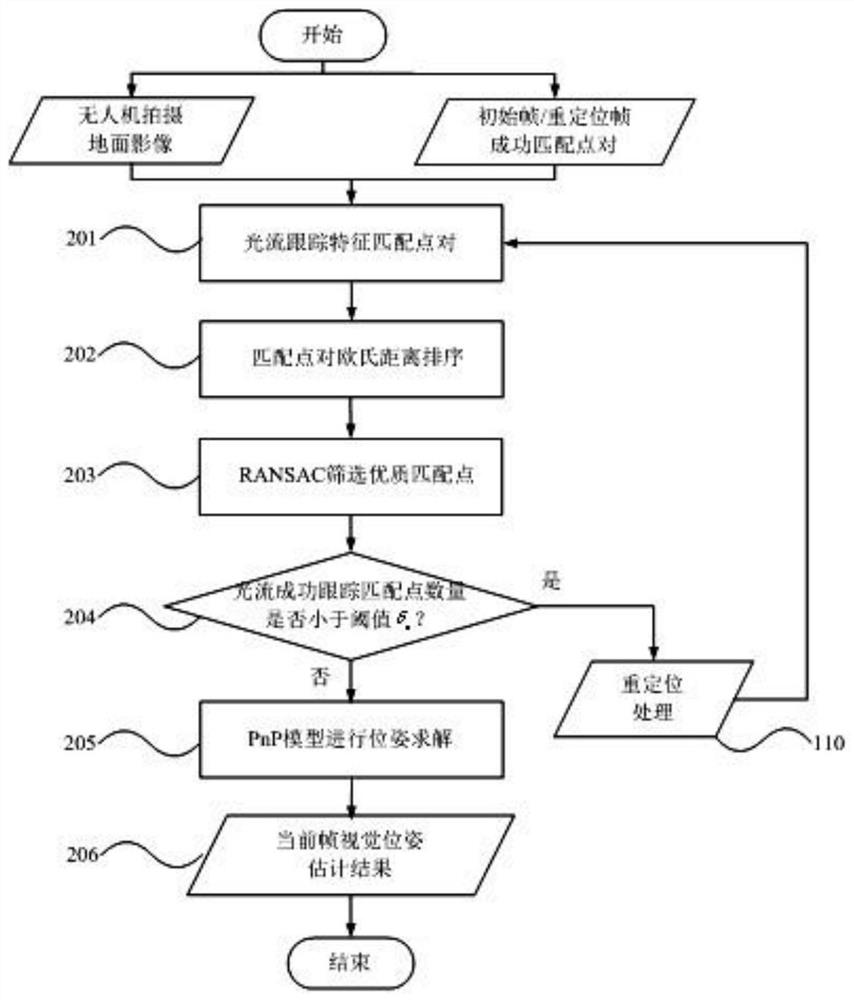
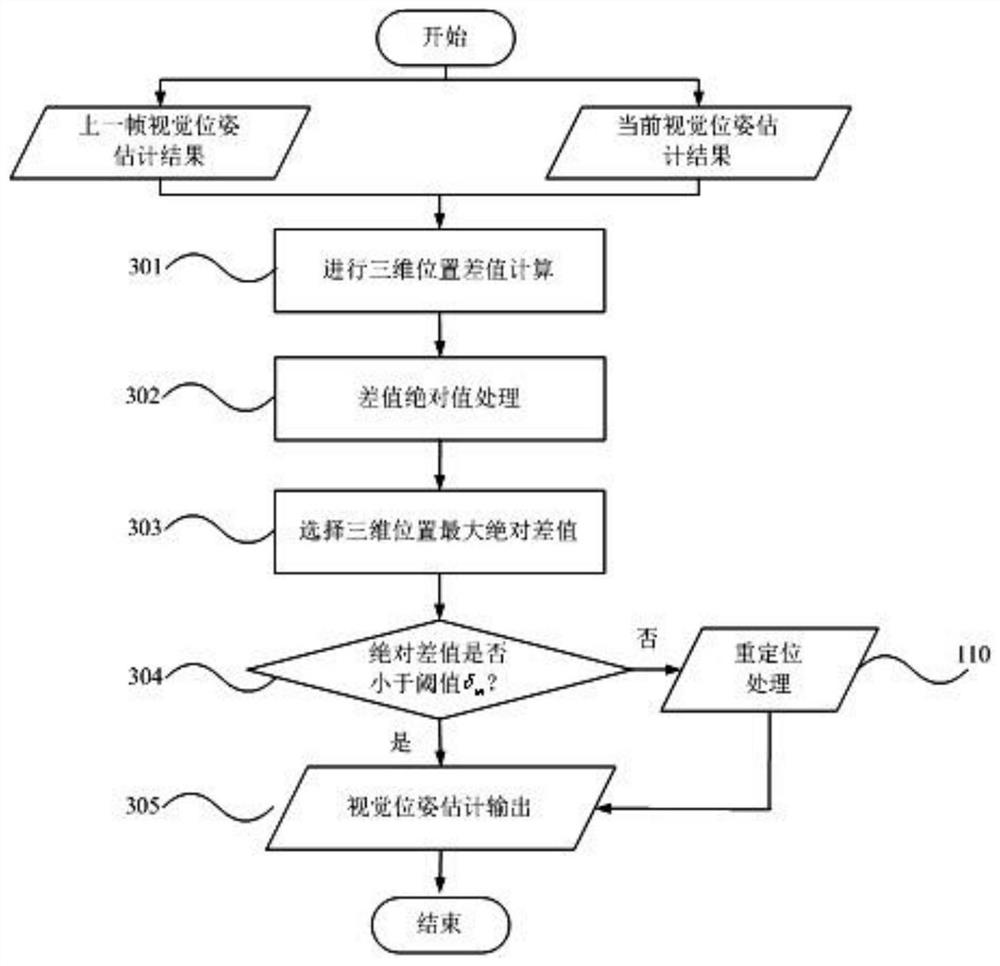
The invention belongs to the field of visual navigation, and particularly relates to a visual pose real-time estimation method based on a digital image map and feature point tracking, which is characterized in that an optical flow method is adopted to track inter-frame matching feature points, so that subsequent frame matching point pairs are obtained in one step, the tedious process of frame-by-frame detection and matching is omitted, and the real-time estimation of the frame-by-frame visual pose is realized. A visual pose real-time estimation method based on a digital image map and feature point tracking is provided, so that real-time frame-by-frame high-precision visual pose estimation in an outdoor large scene is realized, the average frame rate per second of pose estimation experiments in different scenes is more than 55 frames, and a guarantee is provided for real-time visual navigation estimation.
Description
technical field [0001] The invention belongs to the field of visual navigation, and specifically relates to a real-time visual pose estimation method based on digital image maps and feature point tracking. Background technique [0002] At present, the integrated navigation of GNSS (Global Navigation Satellite System, Global Navigation Satellite System) and INS (Inertial Navigation System, Inertial Navigation System) is a commonly used navigation method in the field of drones, which has the advantages of high precision and good real-time performance. However, some complex environments (such as valleys, primitive jungles, urban alleys, strong electromagnetic interference, network power attacks, etc.) can cause GNSS signal loss (called GNSS denial). Since there is no UAV positioning information provided by satellite positioning, UAVs cannot realize "GNSS+INS" integrated navigation, and INS cannot support UAVs' long-term accurate navigation and safe flight due to the cumulative ...
Claims
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More Application Information
Patent Timeline
 Login to View More
Login to View More Patent Type & AuthorityApplications(China)
IPC IPC(8): G06T7/246G06T7/269G06T7/73G06K9/00G06K9/46G06K9/62
CPCG06T7/246G06T7/269G06T7/73G06T2207/10016G06V20/13G06V10/757G06V10/462Y02T10/40
Inventor刘贵喜蔡一凡吴成一马建平贾耀张鹏飞高玉舂
OwnerXIDIAN UNIV