

Unmanned aerial vehicle target tracking system and method based on machine vision
A machine vision and target tracking technology, applied in the field of drones, can solve problems such as affecting target tracking and the impact of drones
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0048] The following will clearly and completely describe the technical solutions in the embodiments of the present invention with reference to the accompanying drawings in the embodiments of the present invention. Obviously, the described embodiments are only some, not all, embodiments of the present invention.
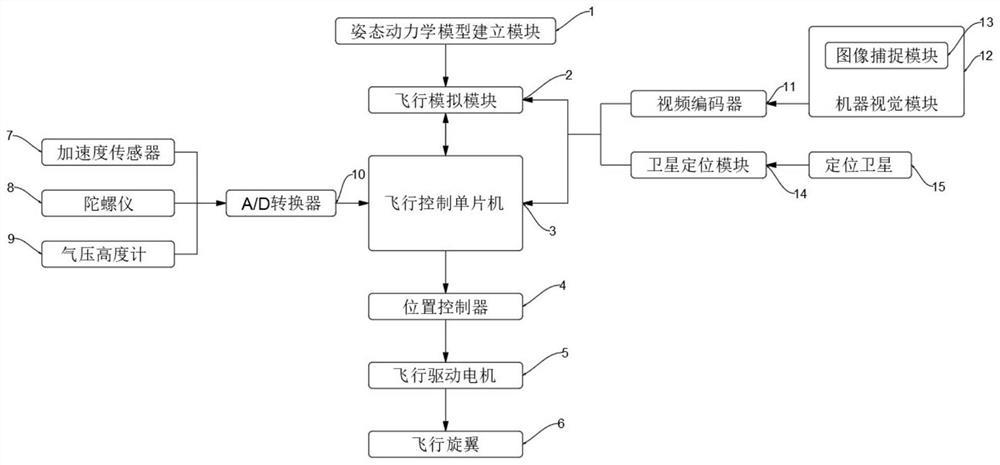
[0049] see Figure 1-2 , an embodiment provided by the present invention: the UAV target tracking system based on machine vision, including a flight control single-chip microcomputer 3, the flight control single-chip microcomputer 3 is connected with the flight simulation module 2 two-way data, and the flight control single-chip microcomputer 3 feeds back to the flight simulation module 2 The actual flight data, the flight simulation module 2 sends the simulated flight data to the flight control single-chip microcomputer 3, the flight control single-chip microcomputer 3 flies according to the simulated value, the input end of the flight simulation module 2 is connecte...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More