

Method, device, equipment and medium for dynamic correction of zero deflection angle of unmanned forklift
An unmanned, zero-declination technology, applied in hoisting devices, two-dimensional position/channel control, vehicle position/route/altitude control, etc., which can solve problems such as loss of pulse signals and inconsistencies in angles.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
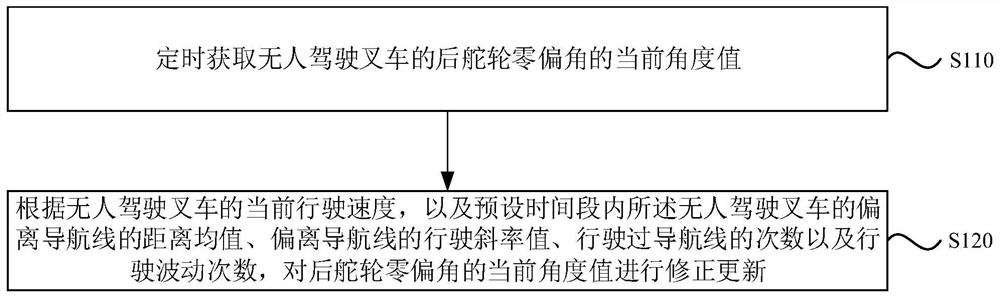
[0025] figure 1 It is a flow chart of a method for dynamically correcting the zero deflection angle of an unmanned forklift provided by Embodiment 1 of the present invention. This embodiment is applicable to the situation where the zero deflection angle is dynamically corrected during the driving of an unmanned forklift. This method can be performed by the dynamic correction device for the zero deflection angle of the unmanned forklift provided by any embodiment of the present invention. The device can be implemented by It consists of hardware and / or software, and can generally be integrated into computer equipment, such as the controller of an unmanned forklift.
[0026] Such as figure 1 As shown, the method for dynamically correcting the zero deflection angle of the unmanned forklift provided in this embodiment includes the following steps:
[0027] S110, regularly acquire the current angle value of the rear steering wheel zero deflection angle of the unmanned forklift.
...
Embodiment 2
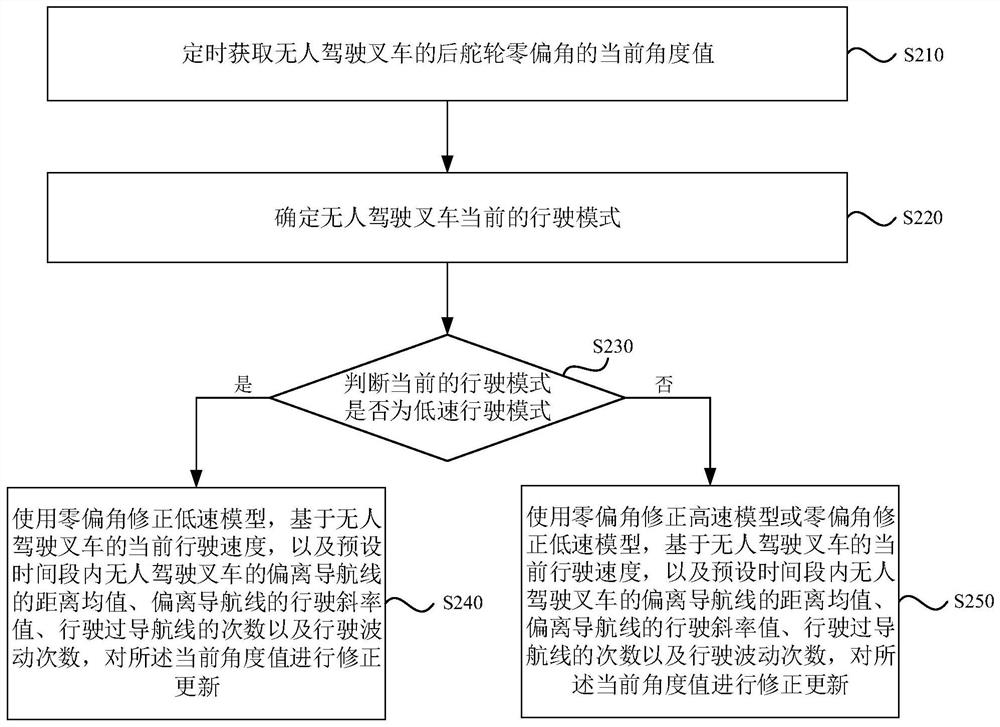
[0050] figure 2 It is a flow chart of a method for dynamically correcting the zero deflection angle of an unmanned forklift provided by Embodiment 2 of the present invention. This embodiment is embodied on the basis of the above-mentioned embodiments, wherein, before correcting and updating the current angle value, it also includes:
[0051] determining the current driving mode of the unmanned forklift, the driving mode including a high-speed driving mode and a low-speed driving mode;
[0052] Correspondingly, according to the current driving speed of the unmanned forklift, and the average distance of the unmanned forklift deviating from the navigation line, the driving slope value of the deviation from the guidance line, the number of times the unmanned forklift has driven through the guidance line, and The number of driving fluctuations is used to correct and update the current angle value, including:
[0053] If the current driving mode is a low-speed driving mode, the l...
Embodiment 3
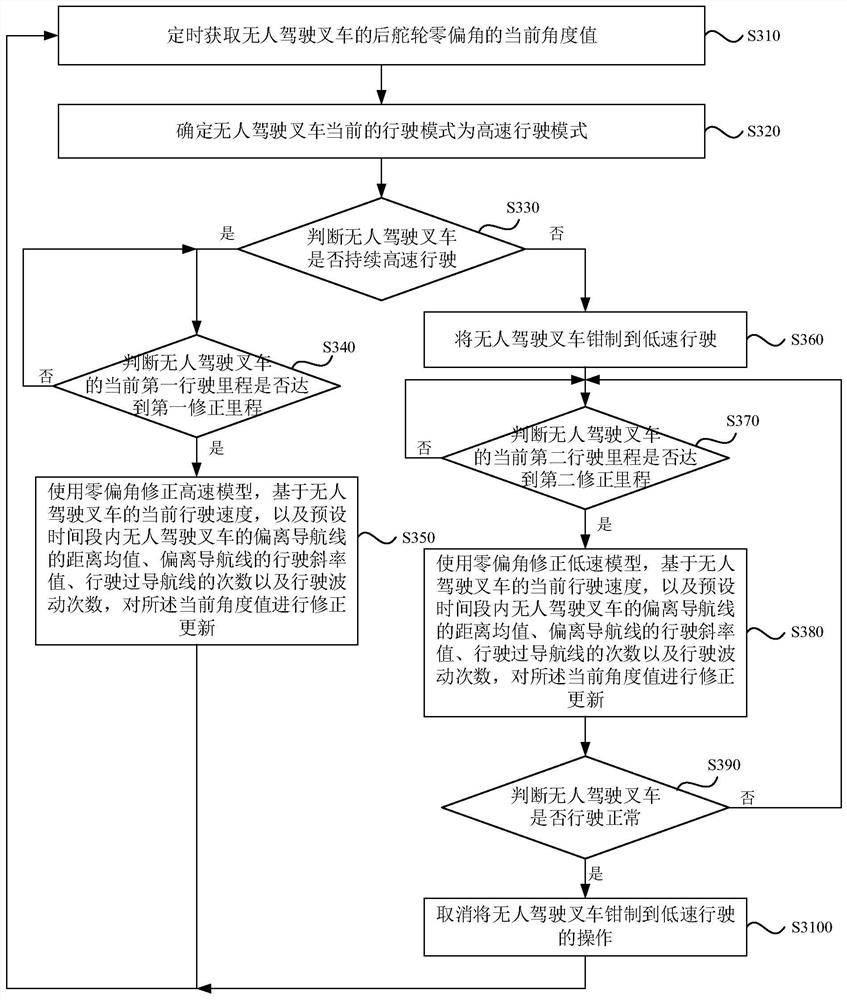
[0096] image 3 It is a flowchart of a method for dynamically correcting the zero deflection angle of an unmanned forklift provided by Embodiment 3 of the present invention. This embodiment provides a specific implementation on the basis of the above embodiments, wherein the command initiated by the controller is a high-speed back command, so that the driving mode of the unmanned forklift is the high-speed driving mode.
[0097] Such as image 3 As shown, the method for dynamically correcting the zero deflection angle of an unmanned forklift provided in this embodiment includes the following steps:
[0098] S310. Periodically acquire the current angle value of the rear steering wheel zero deflection angle of the unmanned forklift.
[0099] S320. Determine that the current driving mode of the unmanned forklift is the high-speed driving mode.
[0100] S330. Determine whether the unmanned forklift continues to drive at high speed, if yes, execute S340, and if not, execute S360...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More