

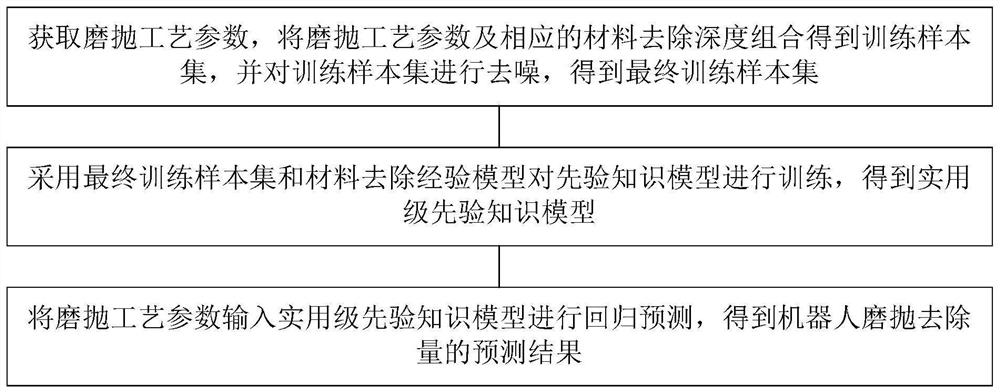
Prediction method and equipment for robot grinding and polishing removal based on prior knowledge model
A priori knowledge and prediction method technology, applied in the direction of instruments, computer parts, characters and pattern recognition, etc., can solve the problem that the robot grinding and polishing system cannot accurately predict the amount of material removal, restrict the development of intelligent robot grinding and polishing, and cannot realize Feedback control and other issues to achieve the effect of improving generalization performance, high grinding and polishing prediction accuracy, and optimizing training ability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0039] In order to make the purposes, technical solutions and advantages of the embodiments of the present invention clearer, the technical solutions in the embodiments of the present invention will be clearly and completely described below with reference to the accompanying drawings in the embodiments of the present invention. Obviously, the described embodiments These are some embodiments of the present invention, but not all embodiments. Based on the embodiments of the present invention, all other embodiments obtained by those of ordinary skill in the art without creative efforts shall fall within the protection scope of the present invention. In addition, the technical features in each embodiment or a single embodiment provided by the present invention can be arbitrarily combined with each other to form a feasible technical solution. This combination is not restricted by the sequence of steps and / or the structural composition mode, but must be in the order of Those of ordi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More