Underwater navigation positioning method and system based on SINS/LBL tight integration
A technology of navigation positioning and tight combination, which is applied in the field of underwater navigation and positioning methods and systems based on SINS/LBL tight combination, and can solve the problems of slow convergence speed of positioning errors
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
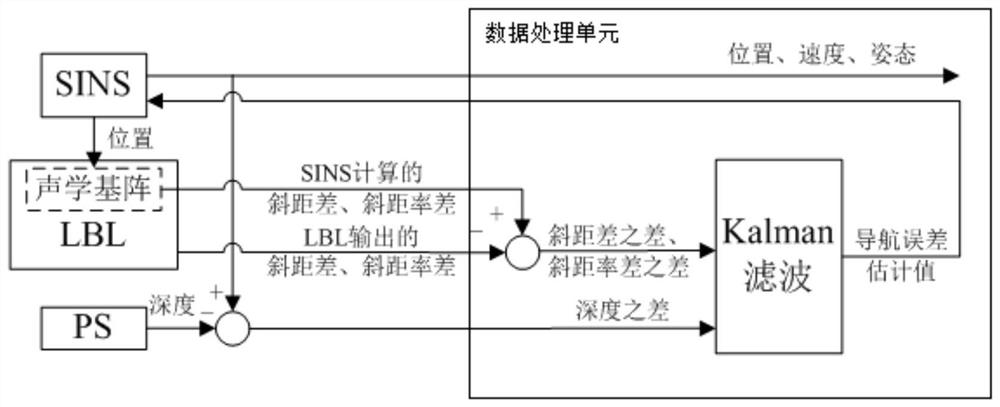
[0092] like figure 1 As shown, an underwater navigation and positioning method based on the tight combination of SINS / LBL, the steps of the method are as follows:
[0093] Step 1, initialize the underwater navigation and positioning system: obtain the initial position parameters of the submersible, obtain the angular velocity and specific force information of the submersible, perform the initial alignment of the strapdown inertial navigation system, and obtain the initial attitude matrix and initial velocity information of the submersible ;
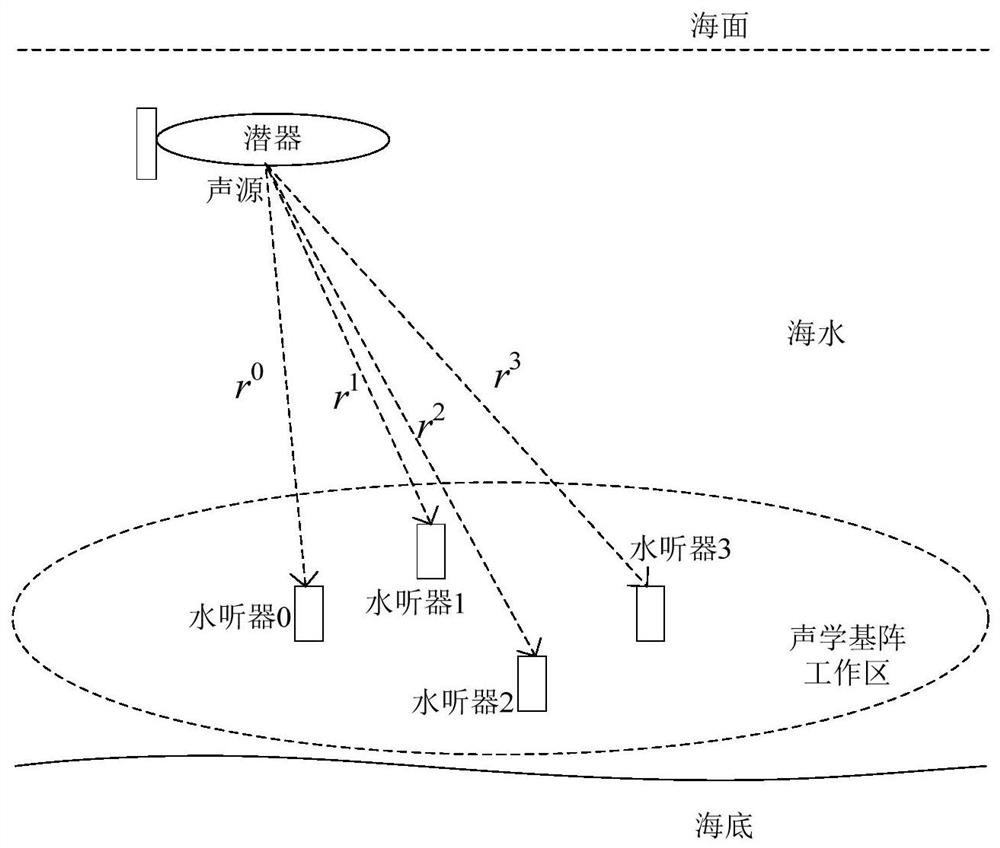
[0094] Step 2, judge the available number of hydrophones in the working area of the acoustic array, when the available number of hydrophones is greater than two, iterate from step 3 to step 5, otherwise stop the iteration and continue to judge the available number of hydrophones The specific judgment method is as follows: Obtain the slant distance of the submersible relative to each hydrophone in the acoustic matrix through the sound s...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More