Intelligent vehicle global path planning method based on improved A star algorithm
A global path planning, smart car technology, applied in vehicle position/route/altitude control, road network navigator, two-dimensional position/navigation control, etc. Optimization and other issues to achieve the effect of small memory footprint, improved security, and fast running speed
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
[0032] In order to make the present invention easier to explain, the present invention will be further described in detail below in conjunction with the accompanying drawings and specific embodiments.
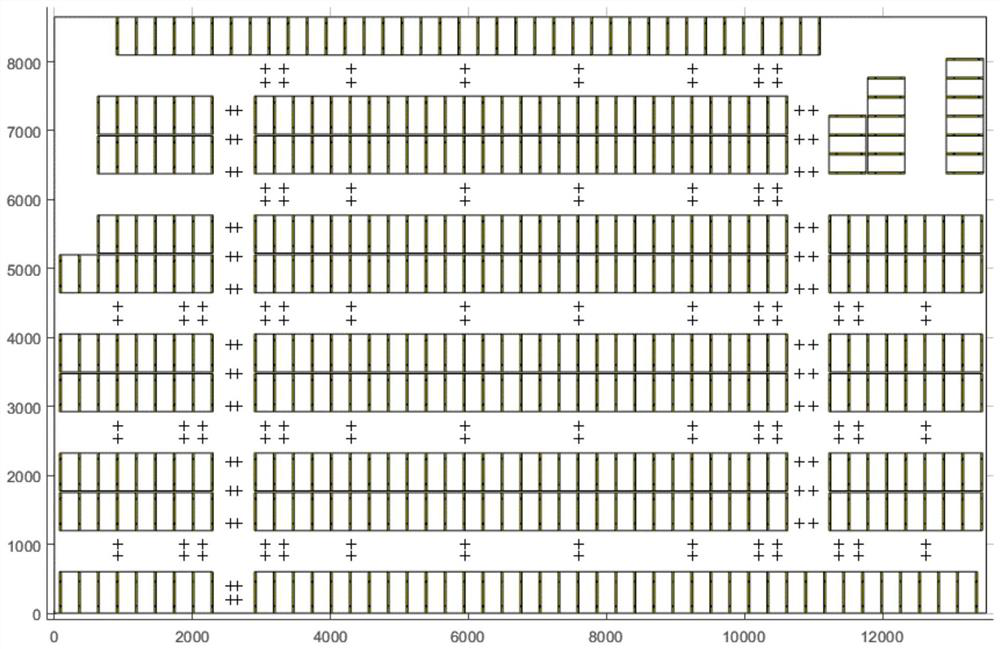
[0033] Such as figure 2 As shown, the global path planning method for intelligent vehicles based on the improved A-star algorithm plans weight control point information in the outdoor parking lot, determines the starting point, end point, and obstacle information, and autonomously guides the vehicle from the starting point to the target point for efficient obstacle avoidance, and At the intersection, safety prompts such as steering, intersection, and deceleration will be prompted, and the optimized path will be displayed. The modification method specifically includes the following steps:
[0034] Step 1, such as figure 1 As shown in the road network section of the outdoor parking lot, the search area is divided into multiple grids, and the center of each grid is regarded as ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com