

Automatic driving intelligent road sweeping man-machine interaction control system and equipment
A technology of human-computer interaction and automatic driving, applied in control/adjustment system, non-electric variable control, vehicle position/route/height control, etc., can solve the problems of lack of communication and contact with the external environment, high operating level requirements, etc., to achieve The effect of improving the efficiency of human-computer interaction
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
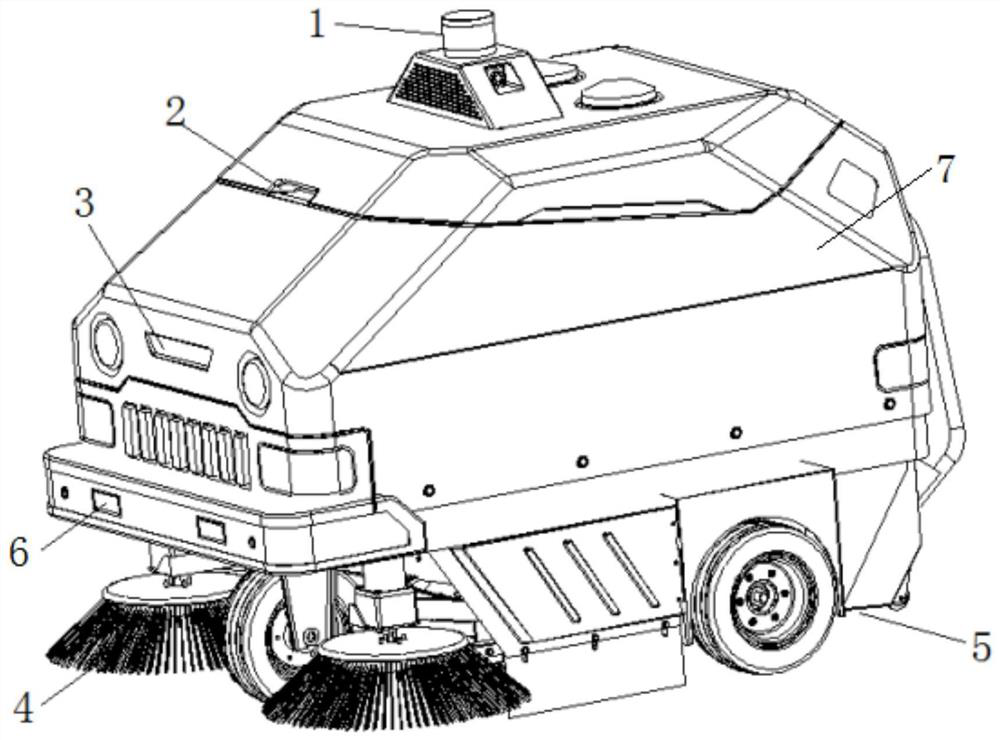
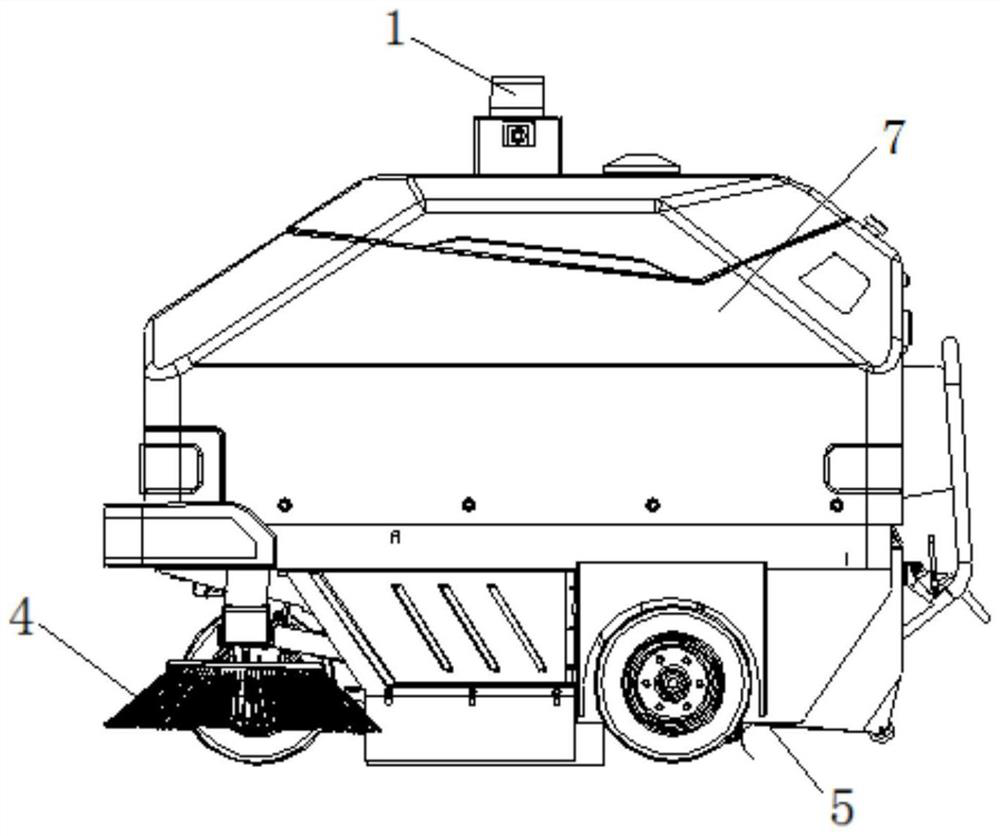
[0039] A human-computer interaction control system for intelligent road sweeping for automatic driving proposed by the present invention includes a fusion modeling module to fuse the information of the perception module and the positioning module, set an instruction library for light and shadow interaction signals, and construct the operation scene required for human-computer interaction; The decision-making planning module makes decision-making planning based on the fusion of perception signals, positioning signals and scene models. It traverses the definition of preset light-shadow interaction signals to start commands, and continuously tracks and records positions and behaviors. The radiation range of the video perception module is the surrounding environment and infrared perception. The modules jointly perceive and record changes in the surrounding environment, and perform light and shadow algorithm fusion; the human-computer interaction module includes a voice interaction m...
Embodiment 2
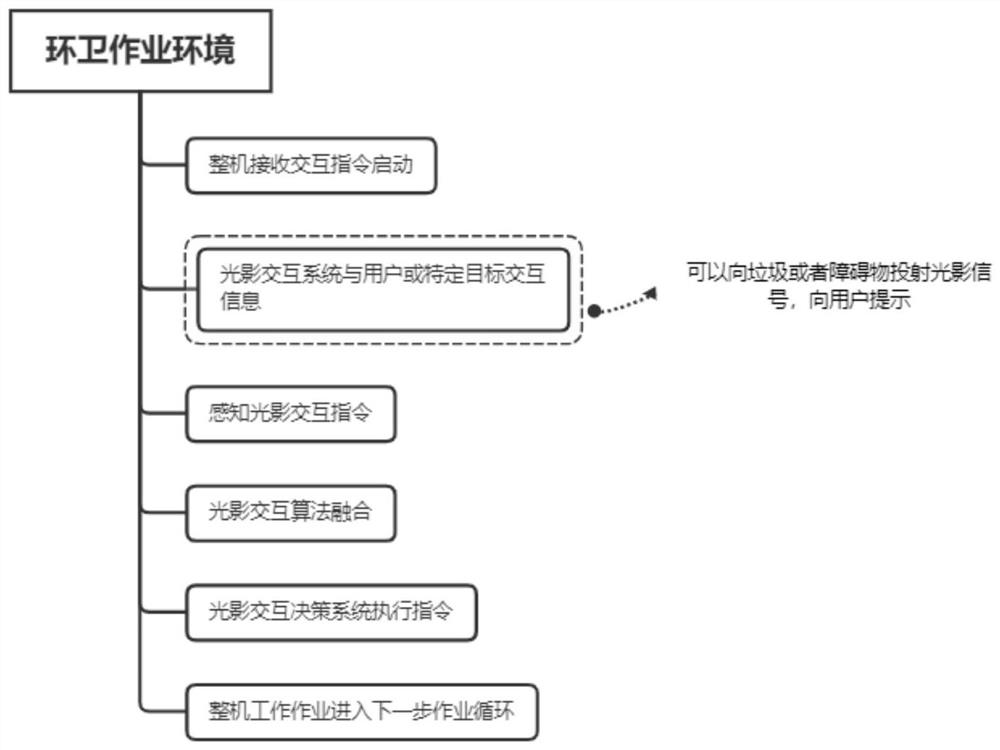
[0047] image 3 It is a schematic flowchart of the control method of the human-computer interaction system according to the embodiment of the present invention. This embodiment is a human-computer interaction control method executed by the whole machine. As shown in the following figure, the human-computer interaction control method of this embodiment may include the following steps:
[0048] step 1:
[0049] The whole machine receives the interactive command to start.
[0050] Specifically, in this embodiment, the interactive objects may be lights and shadows, smart terminals, sounds, and so on.
[0051] Specifically, in this embodiment, the user performs light and shadow interaction with the whole machine. For example, the customer uses an infrared laser transmitter to remotely illuminate the whole machine. Interactive commands. Specifically, in this embodiment, the decision-making system of the whole machine automatic driving system will traverse the definition functio...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More