

Unmanned aerial vehicle alliance network unloading model and decision calculation method
A technology of alliance network and UAV, which is applied in the field of UAV alliance network offloading model and decision-making calculation, which can solve the problems of computing resources affecting computing efficiency, UAV interference, and prolonging queuing delay, so as to improve execution efficiency, The effect of shortening the convergence time and reducing the calculation delay
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
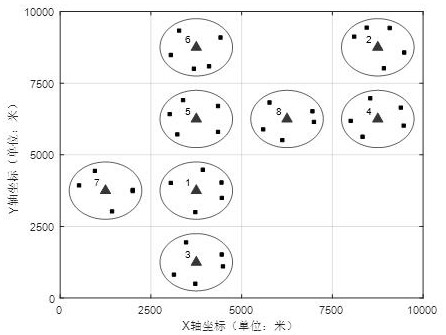
[0051] The first embodiment of the present invention is specifically described as follows. The system simulation uses MATLAB language, and the parameter setting does not affect generality. Suppose the task environment is a square site of 1000m×1000m, which consists of 16 task areas. There are a total of 8 UAV alliance alliances in the network, each alliance includes a leader and several UAV members, randomly distributed in a mission area, such as image 3 Shown. There are a total of 10 available channels in the network, each channel has a bandwidth of B=5MHz, and the background noise is N 0 =-100dBm, path loss factor α=5, and the neighbor's range is limited to within 3000m. The mission data length of the drone members is evenly distributed in [20 100] MB, and the computing resources required to calculate 1bit data are evenly distributed in [100 300] cycles. The transmission power of the drone members is 0.02W, the calculation frequency is 3GHz, the ratio can be set Ω={0,0.2,0....
Embodiment 2
[0054] The second specific embodiment of the present invention is described below. The system simulation uses MATLAB software, and the parameter setting does not affect generality. There are a total of 16 UAV alliances in the network, and each alliance includes 1 leader and 5 UAV members.
[0055] The existing traditional optimal response optimization algorithm, the proposed optimization algorithm and the optimal response non-optimization method (the drone members choose not to unload or all unload) methods, each algorithm is executed 100 times, and the network delay is taken And draw the convergence curve, such as Figure 5 Shown. Compared with the traditional optimal response optimization method, the optimization method of the present invention shortens the convergence time by 75% on the premise of ensuring the validity of the result. Compared with the method that does not optimize the unloading ratio, the sum of the delays of the proposed method is significantly reduced
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More