

Roadside laser radar target detection method and device
A technology of laser radar and target detection, which is applied in the direction of measuring devices, radio wave measuring systems, instruments, etc., can solve problems such as inability to obtain point cloud data, difficulty in ensuring real-time performance, and model overfitting, so as to reduce video memory usage and improve Convergence speed, effect of reducing interference
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0048] In order to make the object, technical solution and advantages of the present invention clearer, the embodiments of the present invention will be further described in detail below in conjunction with the accompanying drawings.
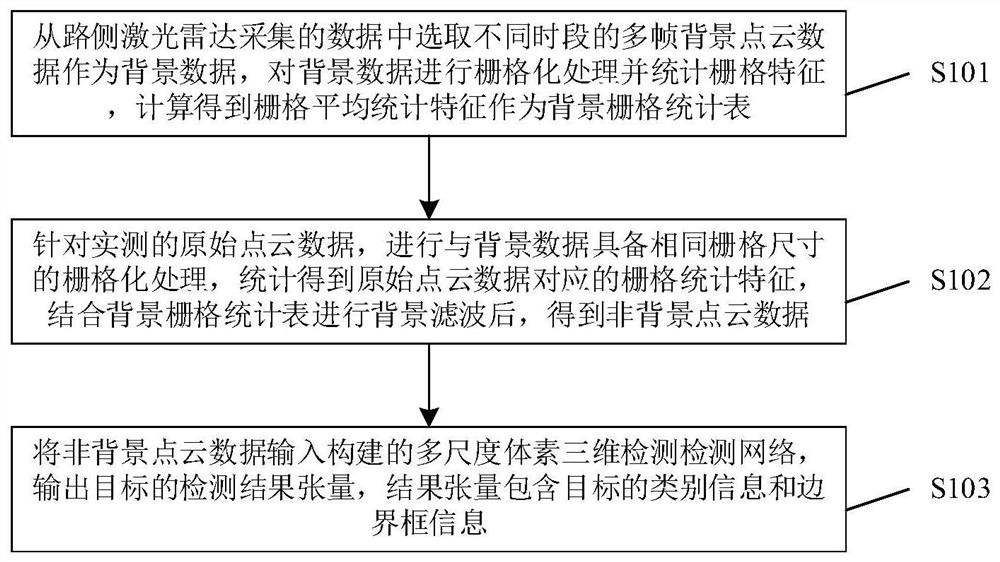
[0049] In the prior art, for roadside lidar target detection, background filtering is performed first, and then the remaining points are clustered using the improved DBSCAN clustering method, and then the statistical characteristics of each cluster are calculated, and a simple three-layer full Connect the network to classify. The above method is a typical traditional machine learning method, which needs to manually define and extract the statistical characteristics of each cluster. At the same time, there will be invalid clusters in the clustering results, and additional steps need to be taken to filter them out. In contrast, the present invention uses a three-dimensional detection network to automatically learn filter features from point clouds...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More