Flexible joint and double-drive gantry rectangular coordinate platform
A technology of flexible joints and direct drive motors, which is applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve the problems of small engineering application scope, achieve the effects of expanding engineering application scope, reducing costs, and improving reliability and stability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0034] The present invention will be more fully understood from the following detailed description, which should be read in conjunction with the accompanying drawings. Detailed embodiments of the present invention are disclosed herein; however, it is to be understood that the disclosed embodiments are merely exemplary of the invention, which may be embodied in various forms. Therefore, specific functional details disclosed herein are not to be interpreted as limiting, but merely as a basis for the claims and for teaching one skilled in the art to vary in virtually any suitable detailed embodiment. The manner adopts the representative basis of the present invention.
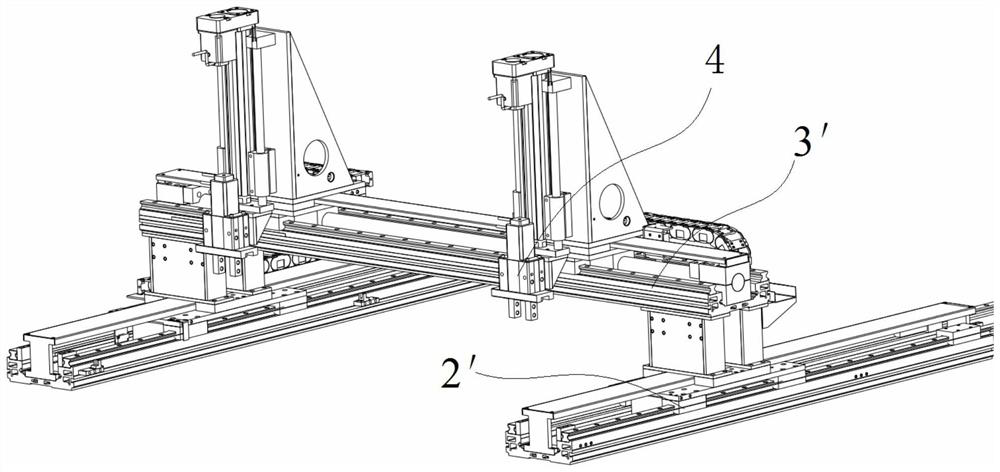
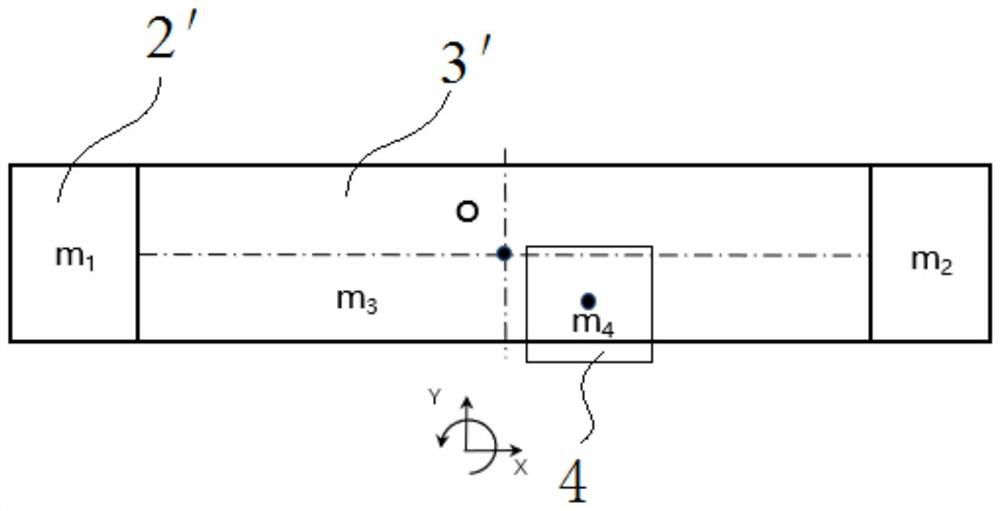
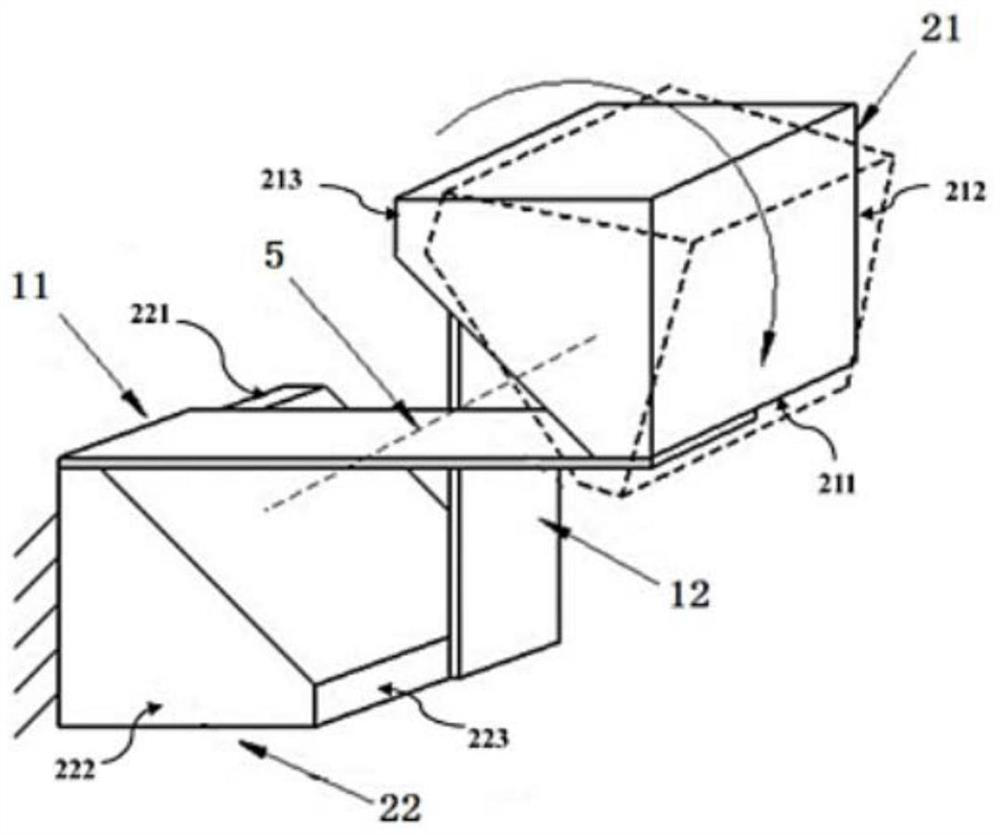
[0035] The flexible joint and double-drive gantry rectangular coordinate platform disclosed by the invention is suitable for high-speed and heavy-load rectangular coordinate platform, which can effectively buffer joint stress, and can realize accurate detection of beam rotation angle through analytical model.
[...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com