

Semantic SLAM service robot navigation method in indoor dynamic environment
A service robot and navigation method technology, which is applied in the field of semantic SLAM service robot navigation methods, can solve the problems of low positioning accuracy, local optimal position, and weak cognitive ability of service robots
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0088]A method for navigating a semantic SLAM service robot in an indoor dynamic environment of the present invention will be further described in detail below with reference to the accompanying drawings and specific embodiments.
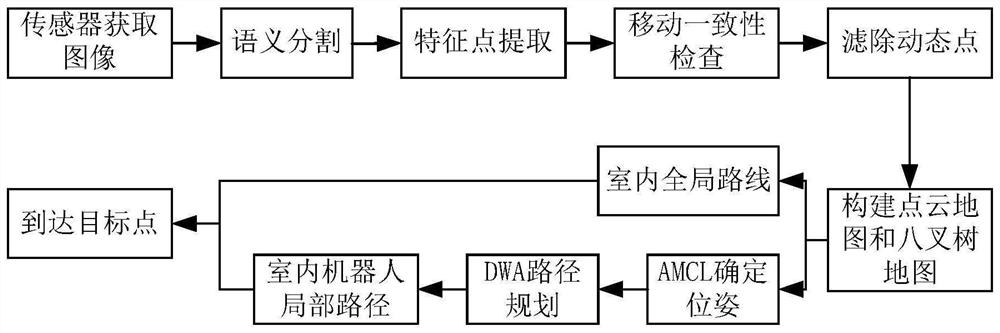
[0089] like Figure 1 to Figure 3 , see figure 1 , the present invention provides a semantic SLAM service robot navigation method in an indoor dynamic environment, comprising the steps of:
[0090] (1) Use the information obtained by the sensor carried by the service robot to perform semantic segmentation and extract feature points. The specific steps are as follows:
[0091] 1) Use the sensor carried by the service robot to obtain the original image information I j , using PSPNet for semantic segmentation, the resulting semantic image C j All the same categories are marked as the same class in the The result score of each pixel point to obtain a semantically consistent result image
[0092]
[0093] Among them, j represents the number of ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More