

A Vibration Suppression Method of Pine Cone Picking Device Based on QL-SI Algorithm
A technology of vibration suppression and algorithm, which is applied to picking machines, manufacturing tools, program-controlled manipulators, etc., can solve problems such as inaccurate positioning of equipment, inability to hit pinecone branches accurately, and affecting the efficiency of pine cone picking operations, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0048] combined with Figures 1 to 11 , the realization of a kind of QL-SI algorithm-based pine cone picking device vibration suppression method according to the present invention is set forth as follows:
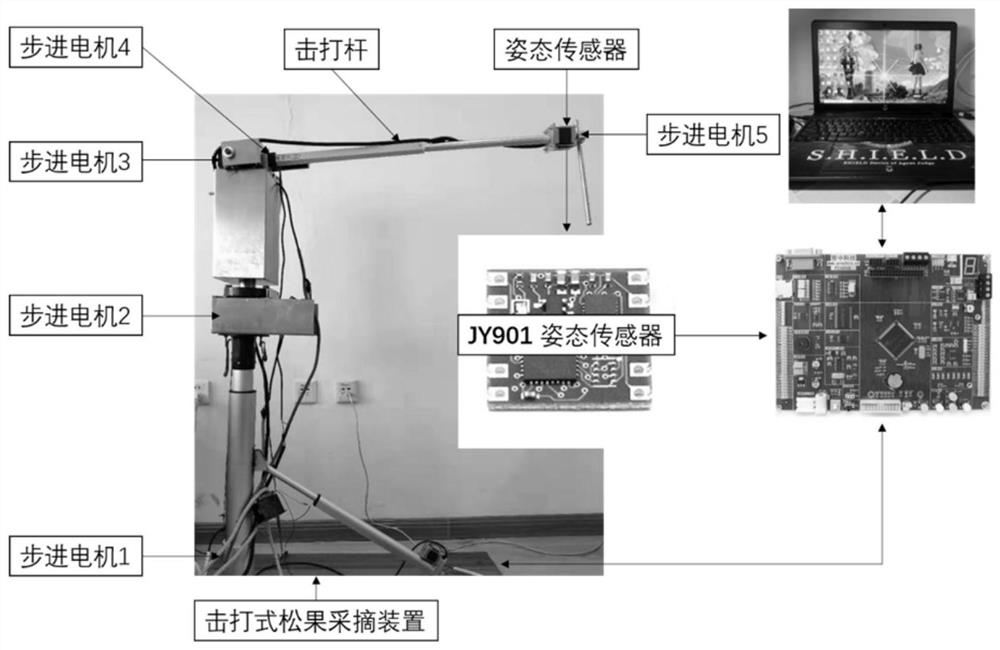
[0049] 1 System structure of hitting type picking device
[0050] figure 1 The striking pine cone picking arm shown is composed of a multi-joint robotic arm and a controller, wherein the multi-joint robotic arm is composed of a connecting rod, a planetary reducer, a coupling, a stepping motor and a base, and the controller It consists of two parts, the STM32 controller and the stepper driver. The models and functions of the components are shown in Table 1. In order to realize the real-time control of hitting, the sampling period is set to 1ms.
[0051] Table 1 Component list
[0052]
[0053] Stepper motor 1 completes the vertical movement through the hydraulic rod, stepper motor 2 completes the 360-degree horizontal rotation through the planetary reducer driving the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More