Disposable cableless remote control underwater explosive-handling robot and design method thereof
An anti-explosive robot, disposable technology, applied in the field of robotics
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0110] The design method of a one-off cable-free remote-controlled underwater detonation robot, including:
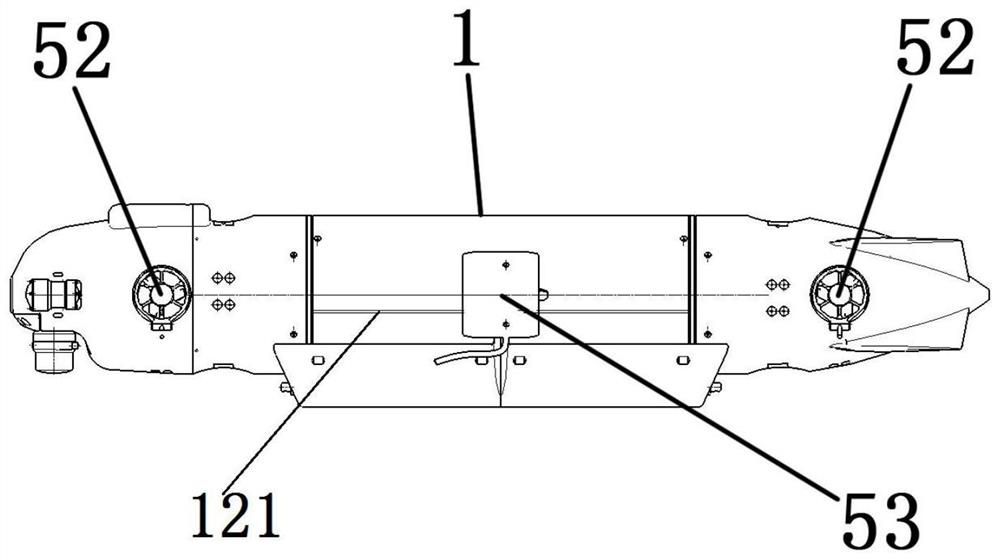
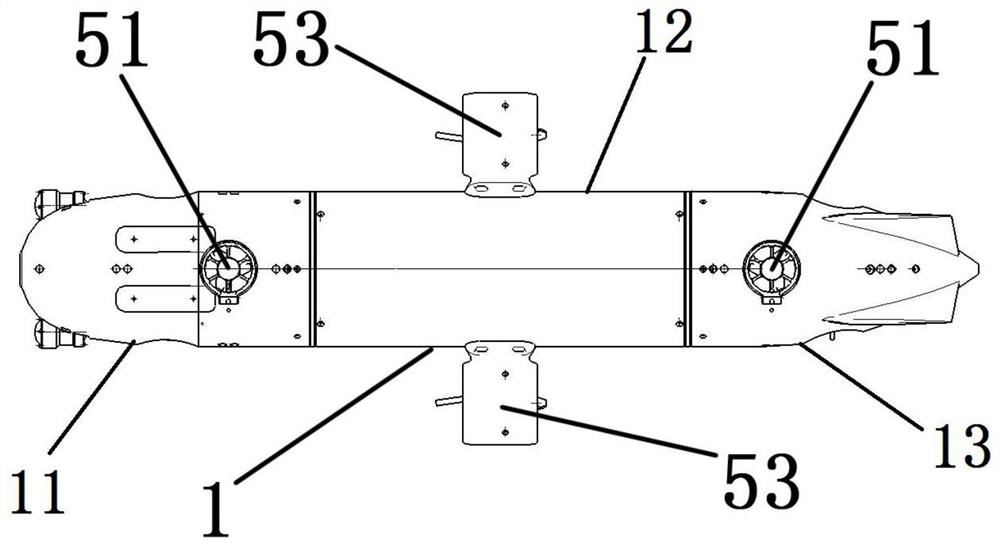
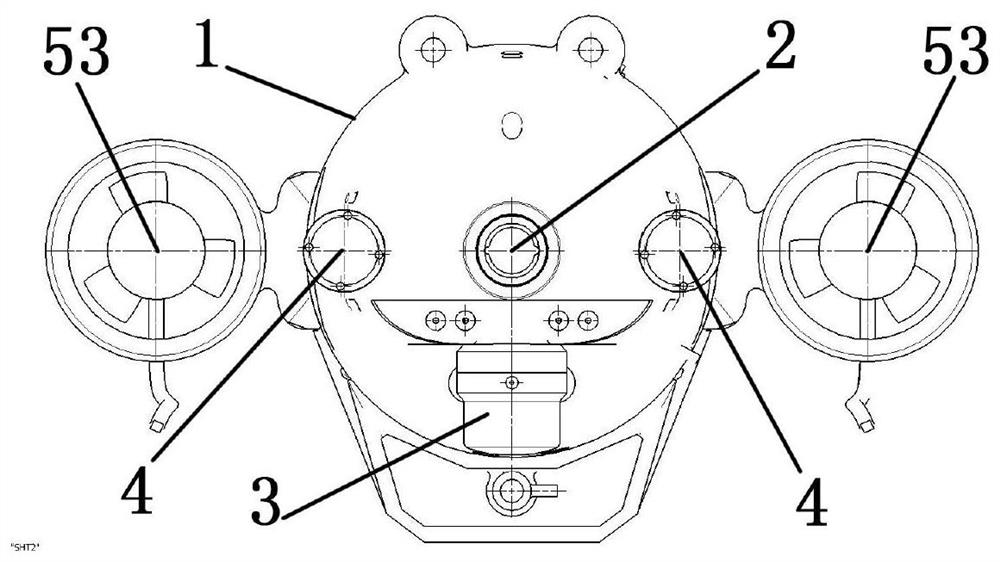
[0111] S1. Design the overall shape of the robot and the layout of the propulsion device
[0112] S101. For an underwater moving object, if only from the perspective of hydrodynamic performance, its ideal shape is a streamlined body of revolution with a length-to-diameter ratio of about 6. However, the actual underwater robot or robot shape, except for deep diving The lifeboat is relatively similar to the above-mentioned boat types, but most of them are far from each other, and their appearance is not streamlined. For the shape selection of the cable-free disposable robot, we can start with the shape resistance coefficient of the object in the water, and according to the shape resistance coefficient of different shapes , we choose the torpedo shape with the smallest drag coefficient as the overall shape of the robot;
[0113] S102. After the overall shape of the robot ...
Embodiment 2
[0186] See attached Figure 8-13 Shown: In order to illustrate the feasibility of the robot designed based on the theoretical calculation and reasoning hypothesis of the first embodiment, the prototype is designed in this embodiment to verify the method:
[0187] S1: Prototype accessories selection, the specific requirements for prototype selection are as follows:
[0188] (1) For the overall shape, since the size of the cable-free disposable robot itself is not very large, the prototype is directly made with a ratio of 1:1;
[0189] (2) The entire robot prototype adopts a single shell structure according to the design of the cableless disposable robot body, and the sealed electronic battery compartment in the middle and the flange covers at both ends of the compartment are made of aluminum alloy;
[0190] (3) In order to save costs and facilitate processing, 3D printing materials are planned to be used in the head and back sections;
[0191] (4) For the convenience of opera...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com