Mechanical arm autonomous calibration method based on visual measurement
A calibration method and visual measurement technology, applied to manipulators, program-controlled manipulators, manufacturing tools, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
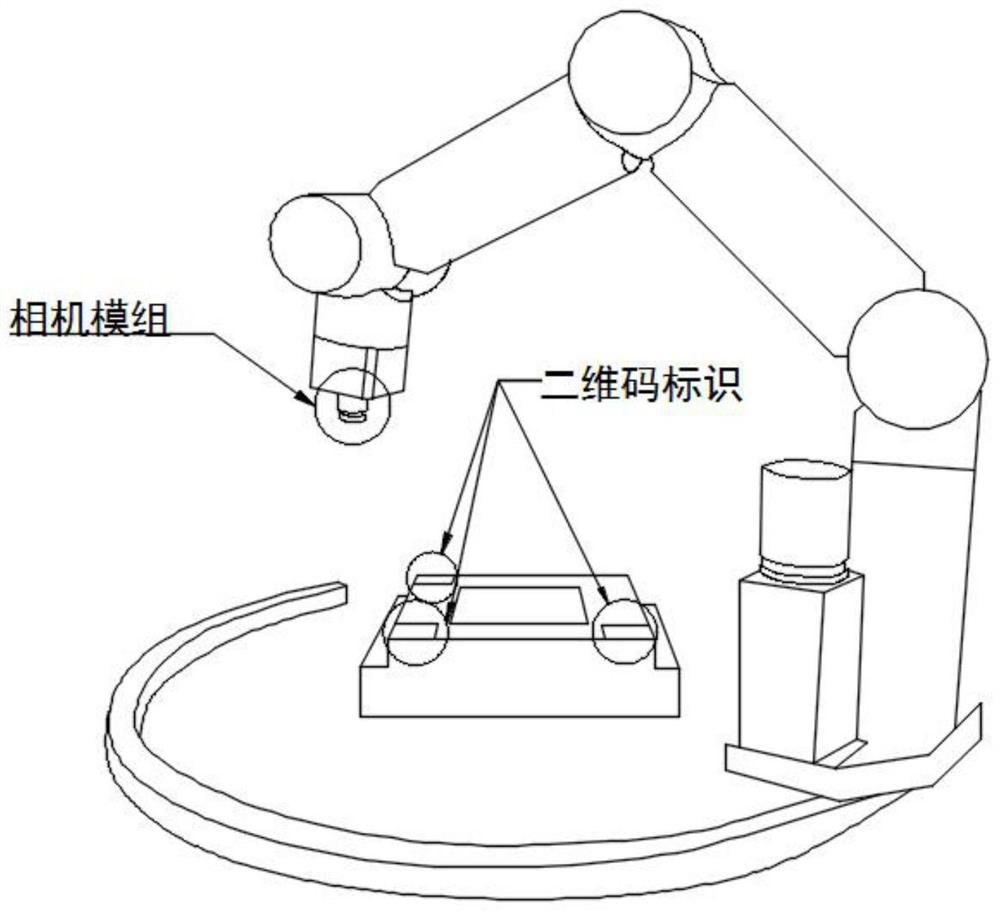
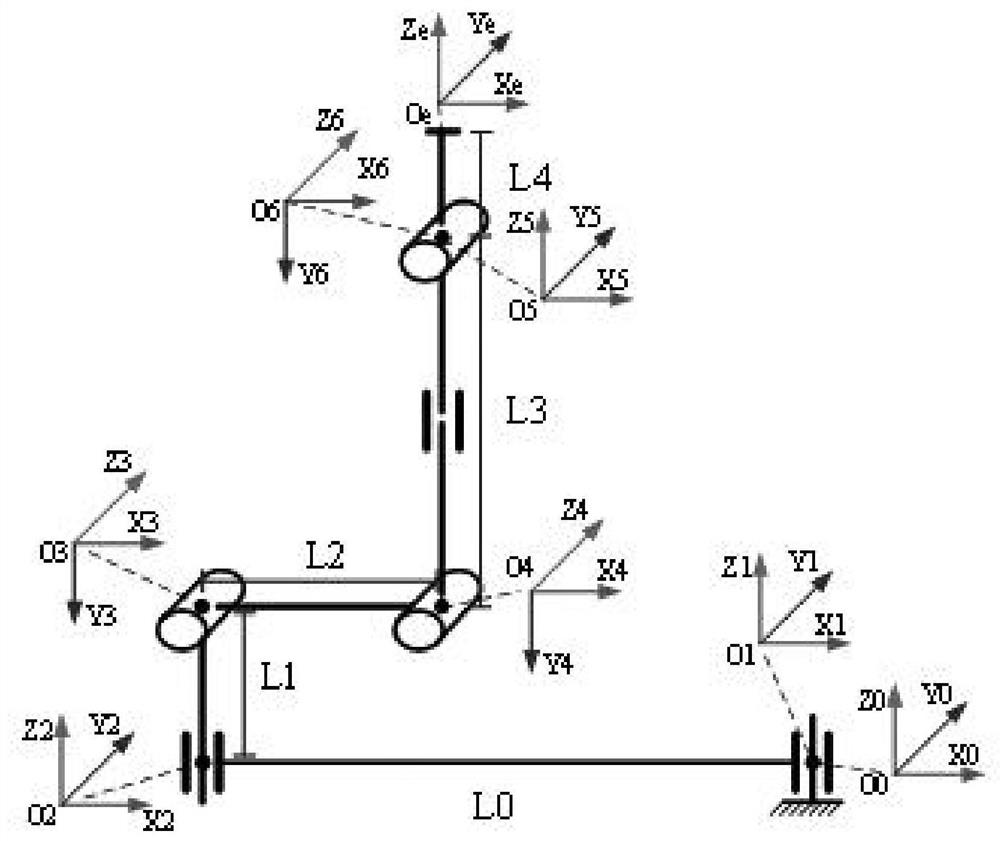
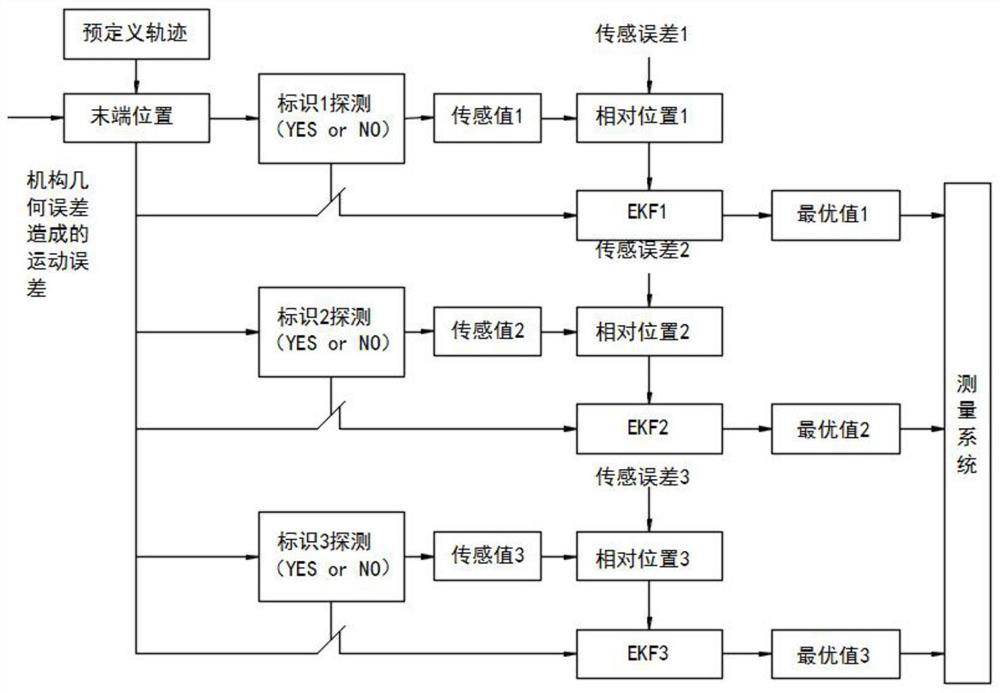
[0112] refer to Figure 1-8 , an autonomous calibration method for manipulators based on visual measurement, including the following steps:
[0113] Step 1: Build an unsteady multi-sensor manipulator vision system;
[0114] Taking the life science glove box robotic arm of China Space Station as the research platform, in order to obtain higher positioning accuracy and improve the fit between the model and the actual geometric configuration of the robotic arm, a more stringent improved DH model was established, and a Group of angles, to represent the error angle of the connecting rod rotating around the y-axis, preferably, all angle values are zero; axis 1 is an arc guideway, in the mechanical model, it is abstracted as a rotation axis with a virtual link, the The length of the connecting rod is equal to the radius of the arc guide rail. During the preparation process, the positions of the three two-dimensional code marking points in the base coordinate system are respectivel...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More