Pneumatically-bent flexible pipeline robot and control method thereof
A flexible pipeline and robot technology, applied in the field of robots, can solve problems such as poor adaptability to the pipeline environment, and achieve the effects of preventing slippage, reducing failure rates and increasing friction.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0041] It should be noted that, in the case of no conflict, the embodiments in the present application and the features in the embodiments can be combined with each other. The present invention will be described in detail below with reference to the accompanying drawings and examples.
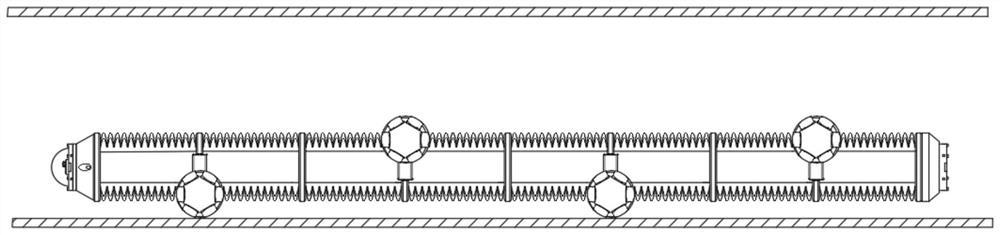
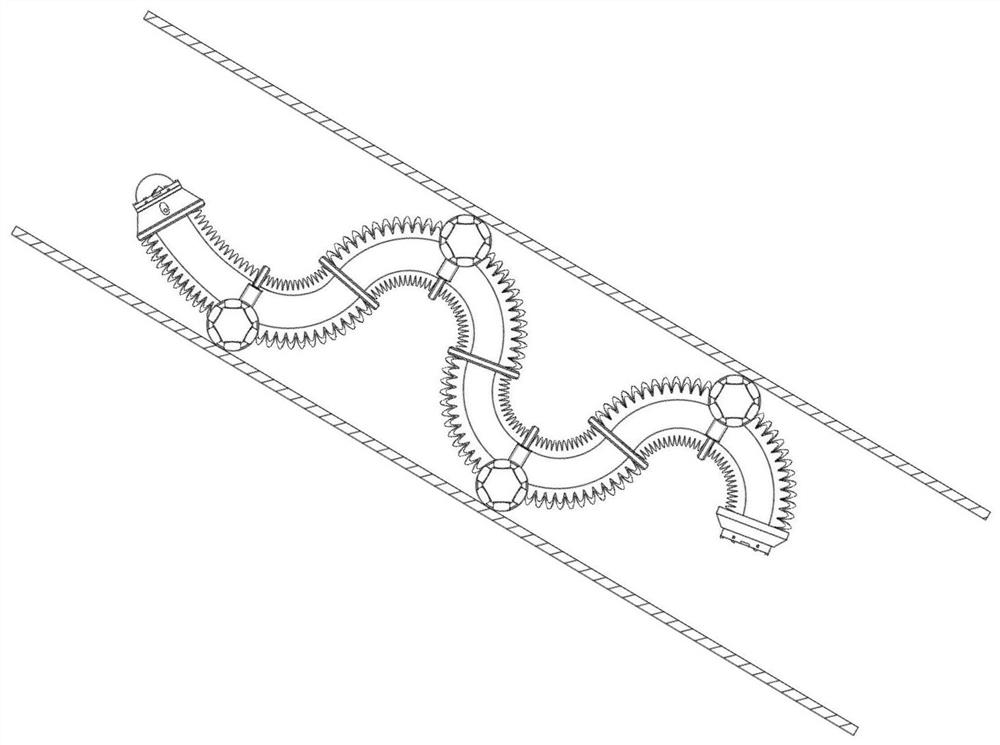
[0042] Such as Figure 1-6 As shown, the embodiment of the present invention provides a pneumatic bending flexible pipeline robot, including: underwater camera 2, light source 3, annular inflatable air bag 4, electromagnetic air valve 5, main hose 7, traveling driving wheel set, air pump 11, A plurality of the annular inflatable airbags 4 are sequentially fixedly connected and then fitted on the main body hose 7 to form the main body of the robot. The annular inflatable airbags 4 are separated into an upper airbag and a lower airbag by a diaphragm; each annular inflatable airbag 4 is equipped with a Described electromagnetic air valve 5, the upper air bag of each annular inflatable air bag 4 a...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com