

Full-drive underwater vehicle track tracking control method based on optimization algorithm
An underwater vehicle and track tracking technology, which is applied in non-electric variable control, height or depth control, control/regulation system, etc., can solve the problem of limited vehicle thrust configuration and hydrodynamic performance, and does not pay attention to track Tracking issues like constraints
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
[0050] The track tracking control method of the fully driven underwater vehicle based on the optimization algorithm of the present embodiment includes the following steps:
[0051] S100, sensor data collection, using the inertial navigation system and underwater acoustic positioning system carried by the aircraft to obtain the current coordinates, attitude and speed of the aircraft in the world coordinate system and body coordinate system.
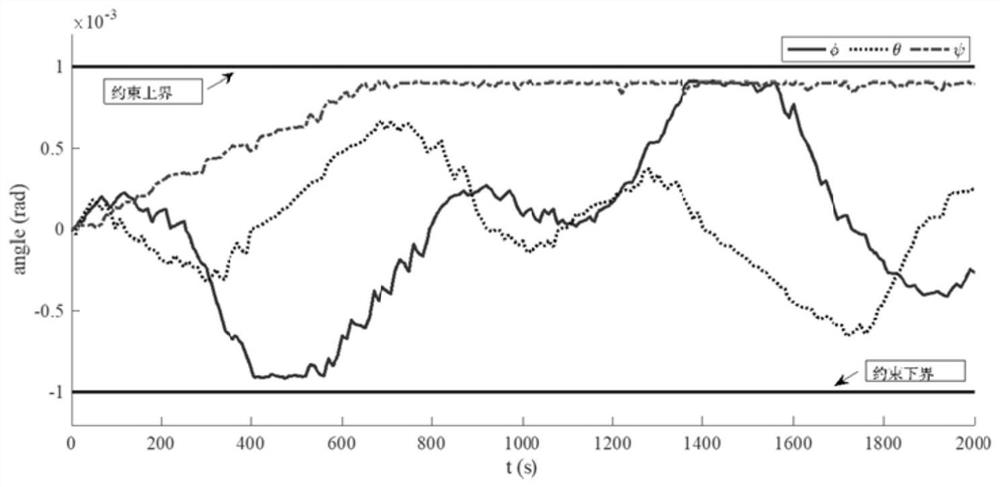
[0052] S200, design the motion attitude constraint vector of the aircraft, whose elements represent the maximum and minimum angles allowed by the roll, pitch and yaw angles respectively; the velocity constraint vector, whose elements represent the linear velocity and angular velocity limit on each degree of freedom.
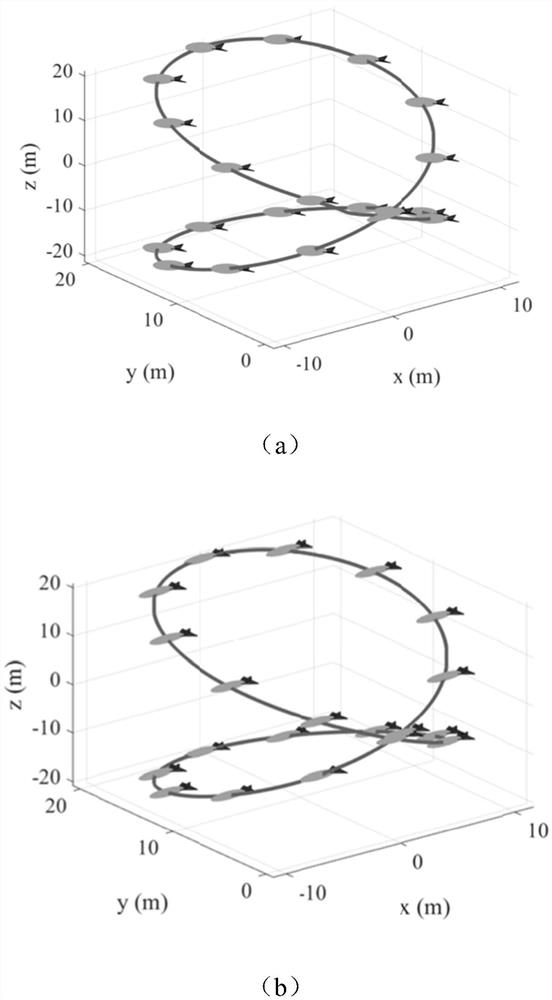
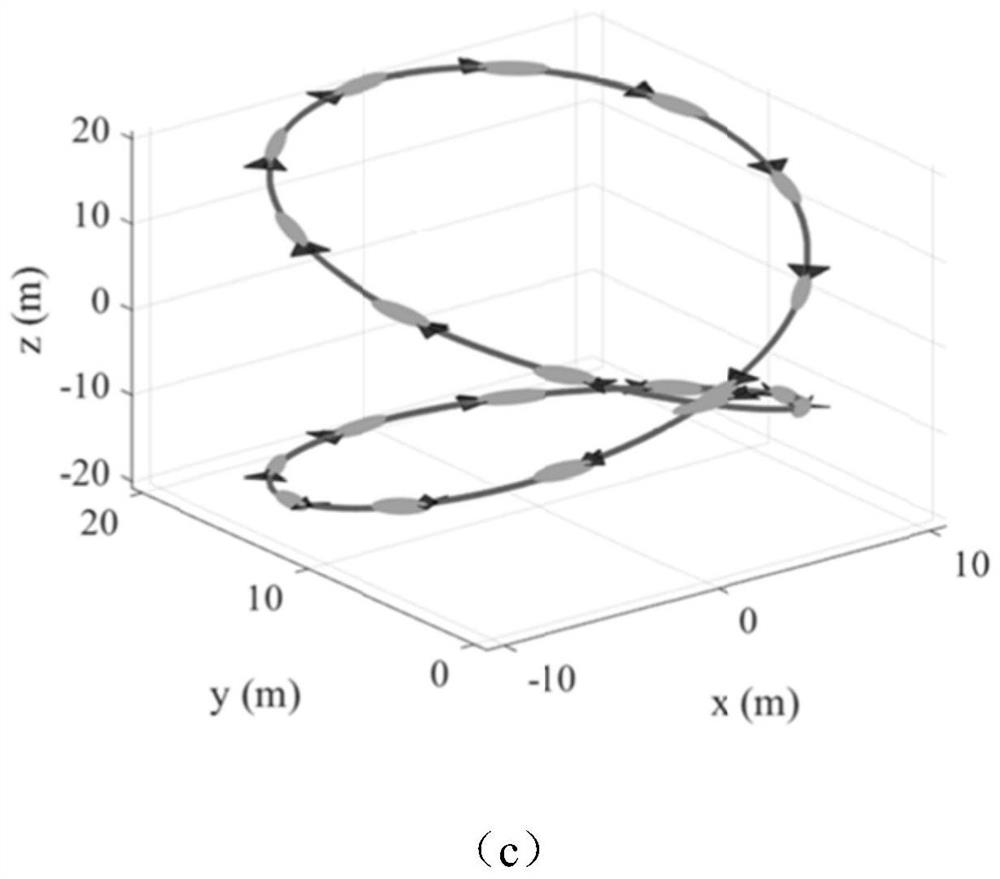
[0053] S300. Calculate a tracking error according to the current coordinates of the aircraft in step S100 and the expected three-dimensional track.
[0054] S400, using the attitude constraint vector design optimization weigh...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More