

Integrated end device for automatic puncture robot
A robot and automatic technology, applied in the direction of surgical robots, manipulators, trocars, etc., can solve the problems of increased use cost, cross-infection, time-consuming and labor-intensive, etc., and achieve the effect of improving work efficiency and simple structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0025] The present invention will be described in detail below in conjunction with the accompanying drawings and specific embodiments. This embodiment is carried out on the premise of the technical solution of the present invention, and detailed implementation and specific operation process are given, but the protection scope of the present invention is not limited to the following embodiments.
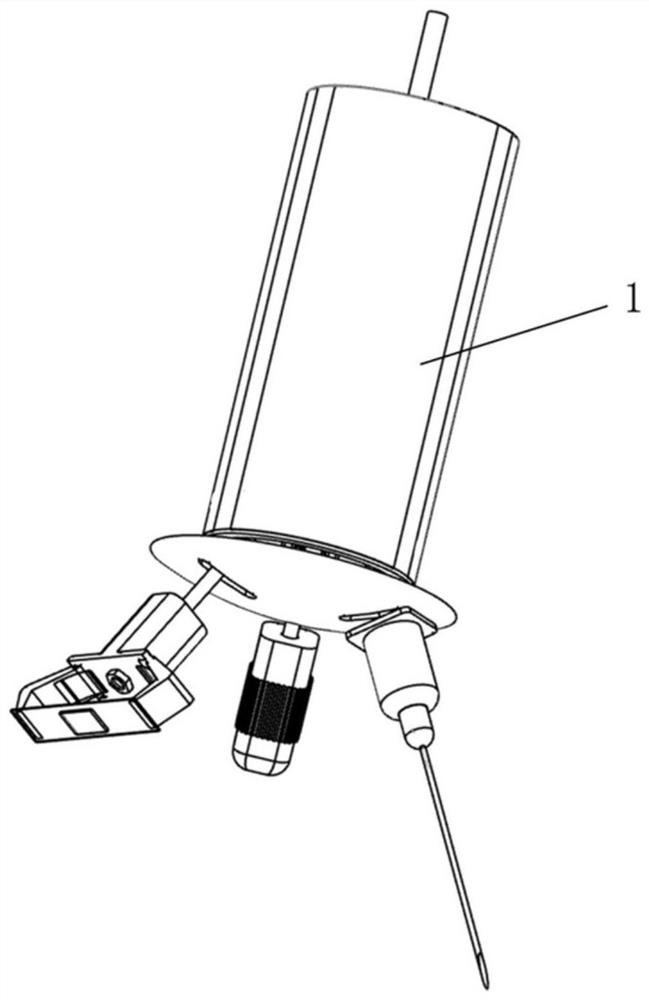
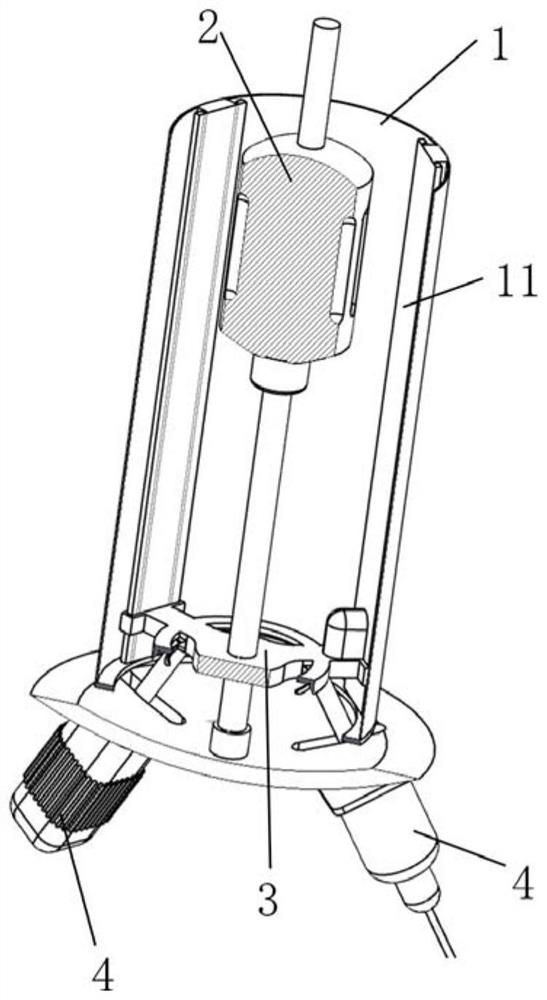
[0026] Such as figure 1 and figure 2 As shown, this embodiment provides an integrated end device for an automatic needle sticking robot, which includes a cylindrical shell 1 , a conversion module 2 , a catch module 3 and a plurality of end tooling 4 .
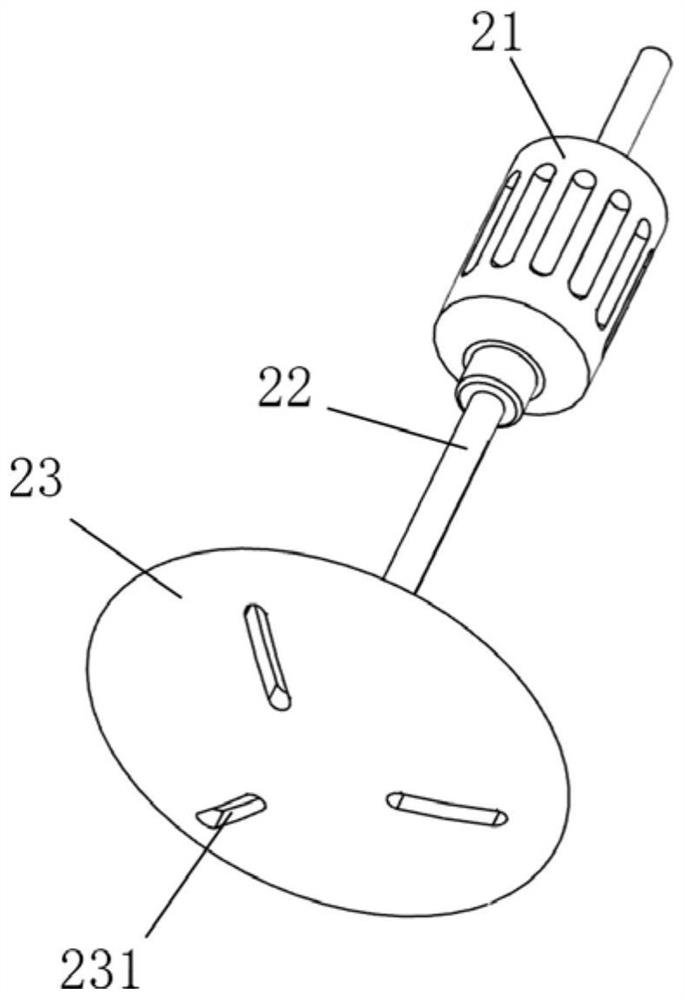
[0027] Such as image 3 As shown, the conversion module 2 includes a rotating motor 21 , a driving rod 22 and a conversion disc 23 . The top end of the drive rod 22 is connected to the output shaft of the rotary motor 21 , and the bottom end is connected to the switching disc 23 . A plurality of elongated holes 231 pointing to the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More