

Robot kinematics parameter identification method based on hybrid genetic simulated annealing algorithm
A simulated annealing algorithm and robot kinematics technology, which is applied in the field of robot kinematics parameter identification based on hybrid genetic simulated annealing algorithm, can solve problems such as large amount of calculation, long time, and genetic algorithm falling into local optimum, so as to improve absolute positioning The effect of precision
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
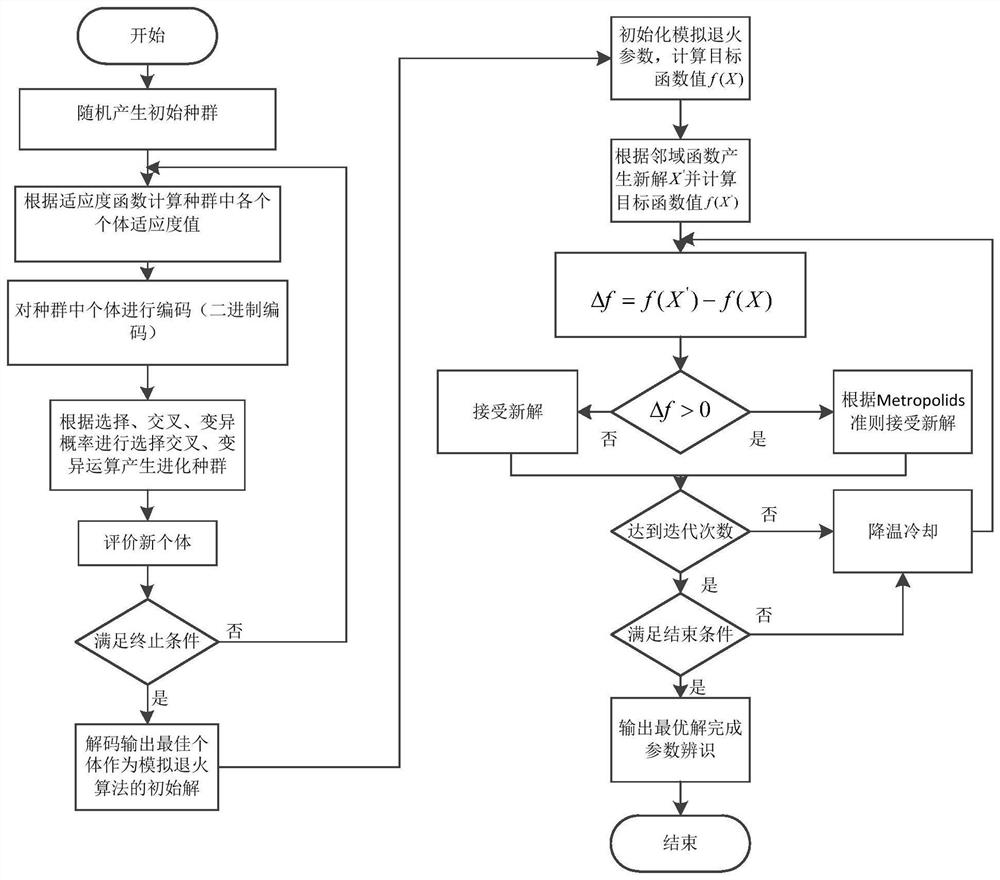
[0063] This embodiment provides a method for identifying robot kinematics parameters based on a hybrid genetic simulated annealing algorithm, including the following steps:
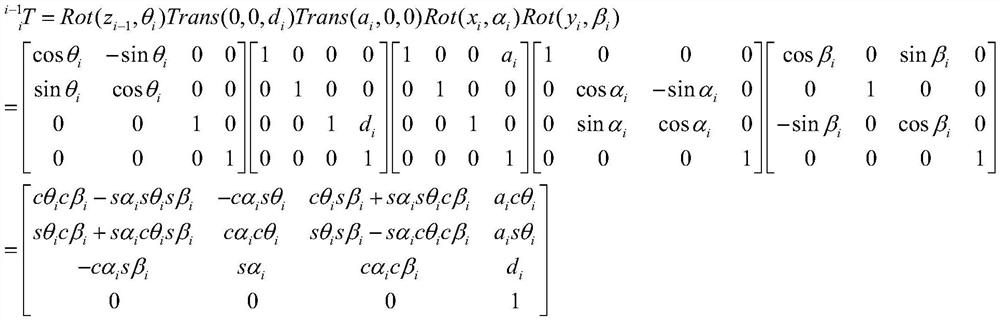
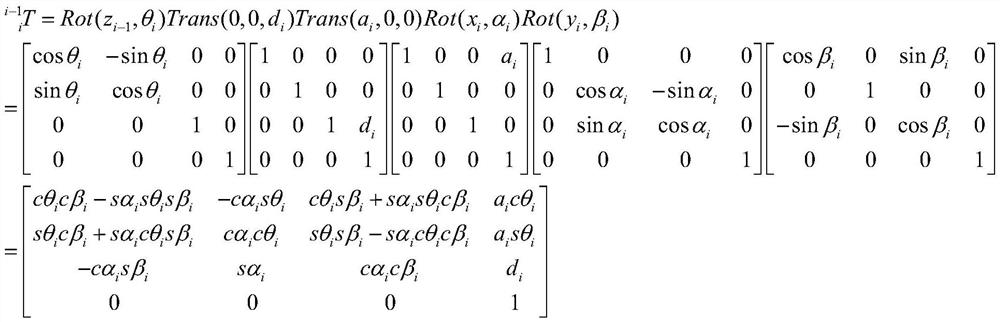
[0064] First, establish the MD-H kinematics model of the six-degree-of-freedom robot. The establishment of the coordinate system is the selection of the direction of the coordinate axis and the origin. The method for establishing the reference coordinate system of the joint axis in the D-H model is as follows:
[0065] (1) Establishment of z-axis direction
[0066] The coordinate system established at joint i is named coordinate system i-1. If joint i is a rotation axis joint, the z-axis direction is consistent with the axis of the joint rotation axis; if joint i is a moving joint, set its moving direction as the z-axis axis direction;
[0067] (2) Establishment of the origin of the coordinate system and the direction of the x-axis
[0068] There may be three geometric relationships between the axes of ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More