

Automatic sampling control system and method based on SCARA robot
An automatic sampling and control system technology, which is applied in the general control system, control/regulation system, digital control, etc., can solve the problems that SCARA robots cannot be used to automatically take samples and set out, so as to ensure safety and stability and reduce service life. Influence and reduce the effect of investment
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
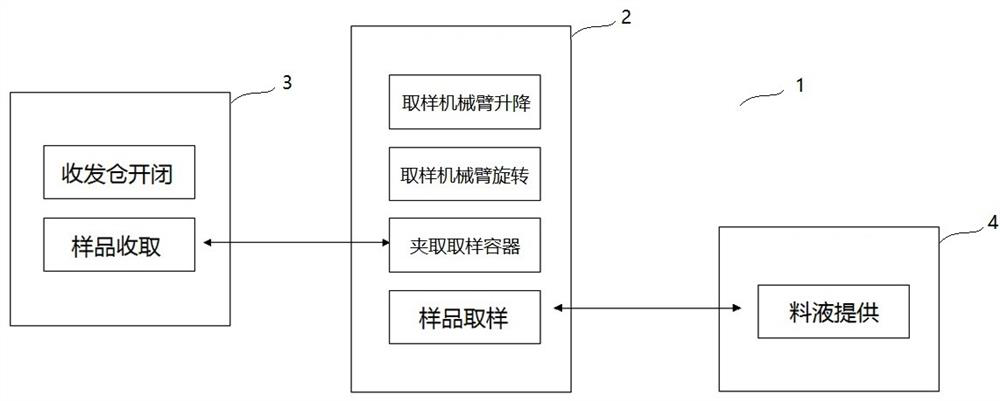
[0039] Embodiment 1, with reference to attached figure 1 .
[0040] Such as figure 1 As shown, the present invention provides an automatic sampling system based on a SCARA robot, including a control device and a sampling device, wherein the control device includes a control component, a simulation component and a communication component, and the control component controls the sampling device to perform sampling operations, and the simulation component The communication component maintains communication with the control component and performs real-time simulation on the operating status of the sampling device controlled by the control component. The control component includes PLC and drive motor, and the simulation component includes a VR system. In order to improve stability, the control component can be selected Beckhoff PLC, drivers and motors can choose Zhenzheng, and communicate with the VR system through the Beckhoff PLC. The VR system generates the real-time operating s...
Embodiment 2
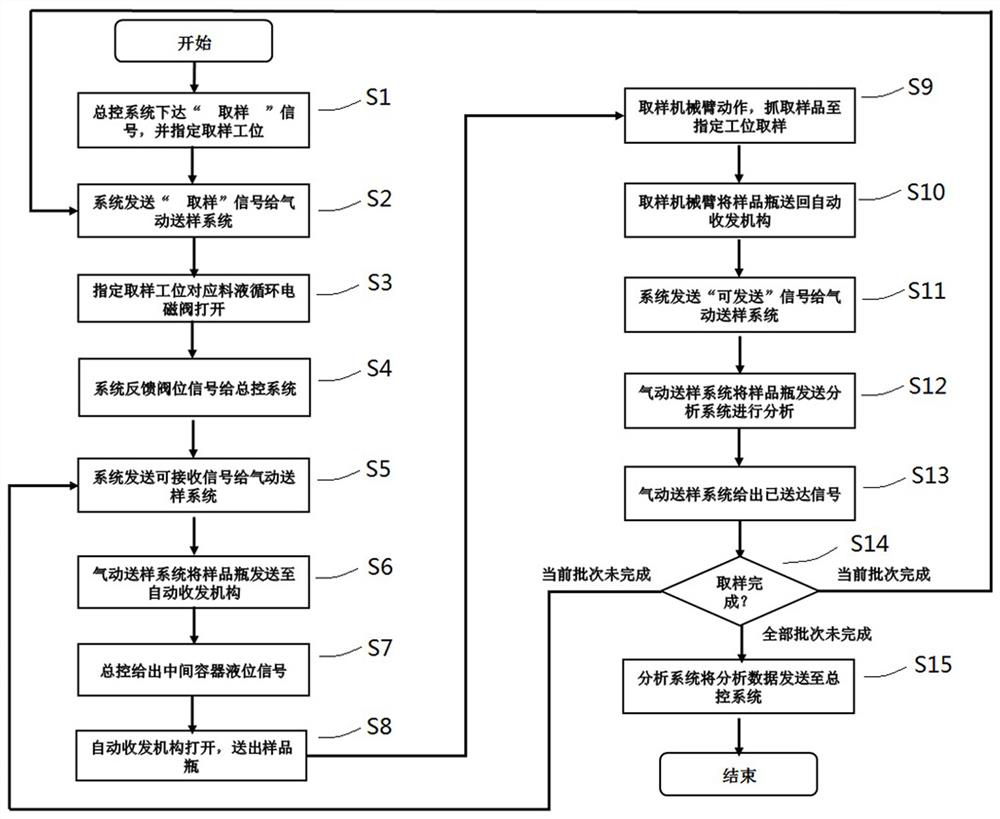
[0047] Embodiment 2, with reference to attached figure 2 .
[0048] On the basis of the above-mentioned automatic sampling system, the present invention also provides a kind of automatic sampling control method based on SCARA robot, such as figure 2 As shown, the control method can control the above-mentioned automatic sampling system to automatically take and set out samples, and includes the following steps:
[0049] Step S1, the master control system issues a "sampling" signal to the sampling system, and designates a sampling station, that is, the location of the sampler;
[0050] Step S2, the system sends a "sampling" signal to the pneumatic sample delivery system;
[0051] Step S3, the material-liquid circulation solenoid valve corresponding to the designated sampling station is opened;
[0052] Step S4, the system monitors the electromagnetic valve position of the material-liquid circulation valve and feeds back the valve position signal to the master control system...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More