

Multi-assembly station operation safety system based on force perception and implementation method thereof
An assembly station, safe operation technology, applied in general control systems, control/regulation systems, comprehensive factory control, etc., can solve problems such as hidden dangers in production safety, workpiece deformation and damage, affecting production rhythm, etc., to ensure personal safety and safety. Equipment security, guarantee real-time and stability, the effect of shortened time
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0029] The present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments.
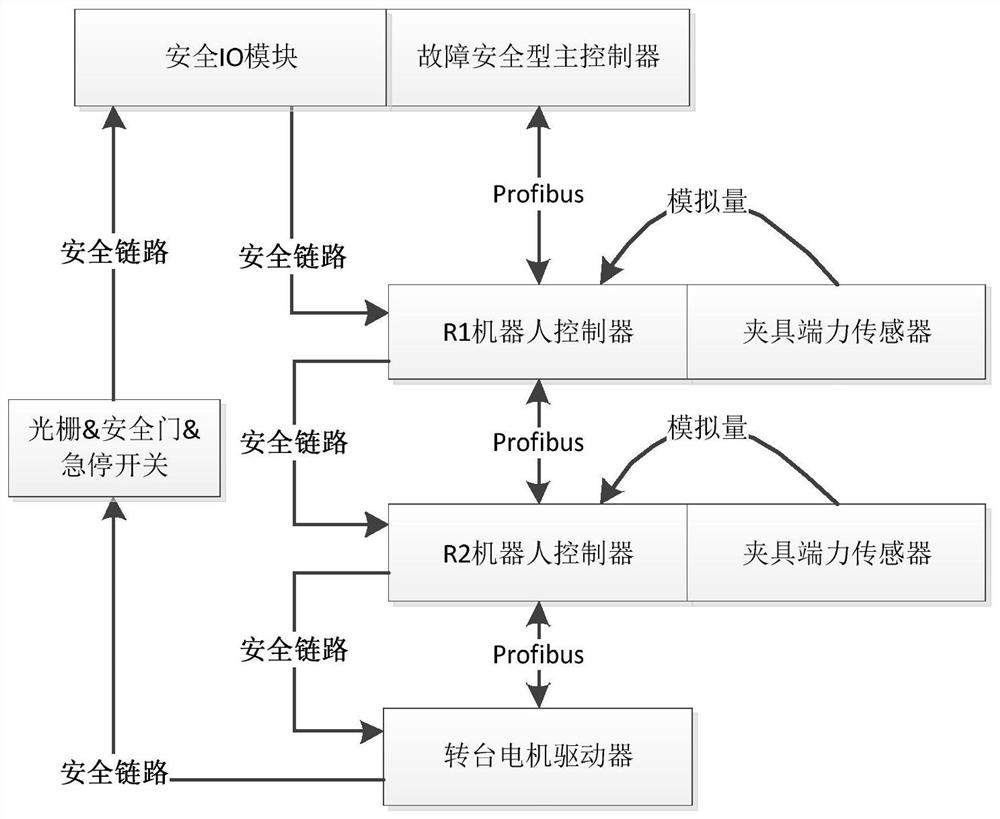
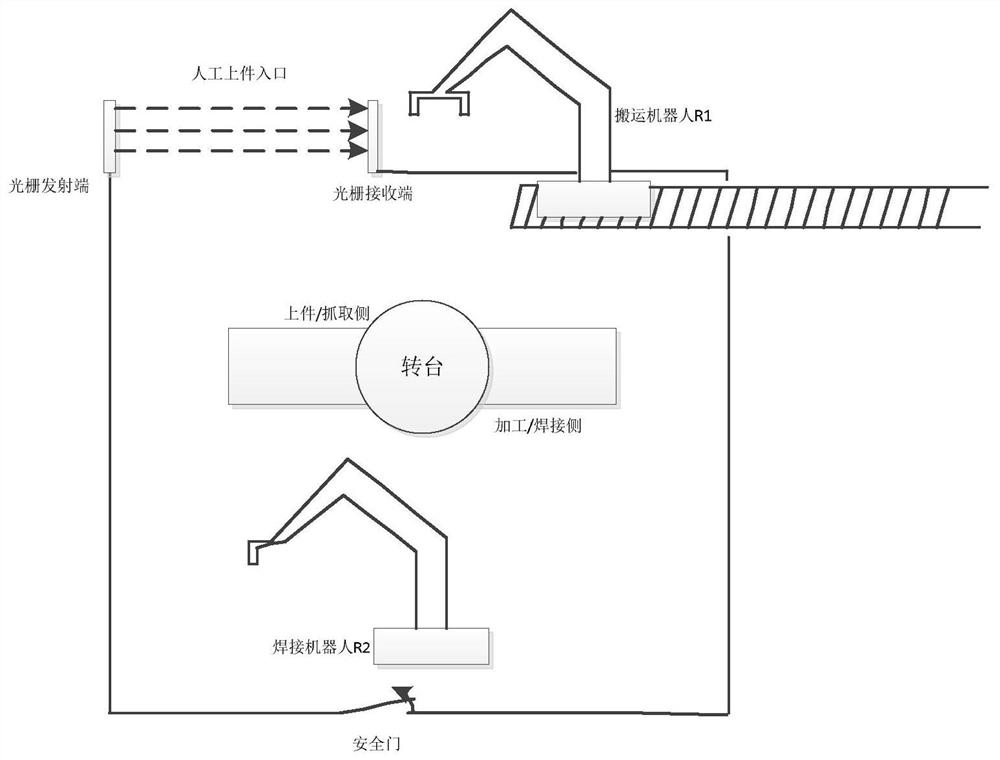
[0030] Such as figure 1 with figure 2 As shown, the multi-assembly station operation safety system based on force perception includes: main controller, turntable, turntable servo drive, fence system, handling robot and functional robot;
[0031] Turntable motors, turntables, handling robots and functional robots are all located in the fenced area;
[0032] The main controller is connected to the servo driver, handling robot and functional robot through the field bus to realize data communication and status monitoring; the servo motor of the turntable is driven by the servo driver, and the servo driver forms a closed-loop control structure with the main controller through bus communication, and the start and stop of the servo motor Operation is controlled by the main controller.
[0033] Each station uses the turntable as the core transmiss...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More