

Unmanned aerial vehicle cluster collaborative learning method based on multi-agent reinforcement learning
A reinforcement learning, multi-agent technology, applied in neural learning methods, computer components, design optimization/simulation, etc., can solve problems such as inability to effectively obtain global information, inability to achieve autonomous decision-making, and limited vision of UAV information sensors
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0029] Below in conjunction with specific embodiment, further illustrate the present invention, should be understood that these embodiments are only used to illustrate the present invention and are not intended to limit the scope of the present invention, after having read the present invention, those skilled in the art will understand various equivalent forms of the present invention All modifications fall within the scope defined by the appended claims of the present application.
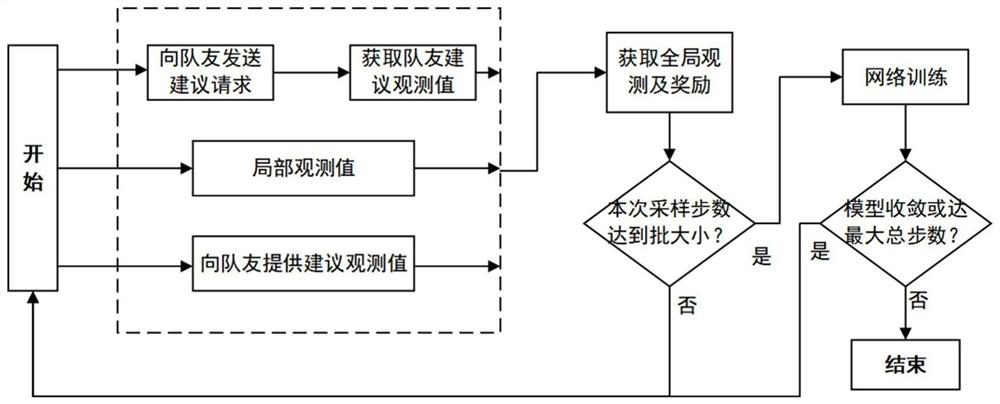
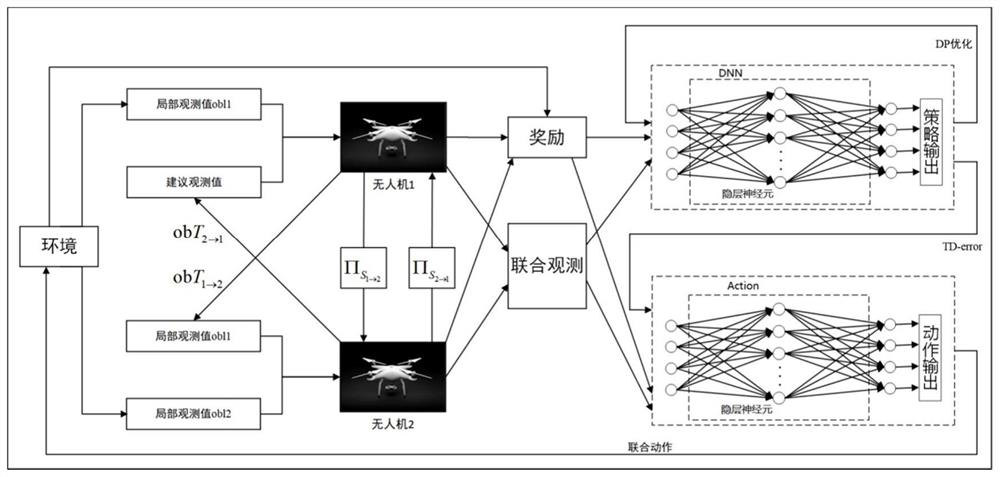
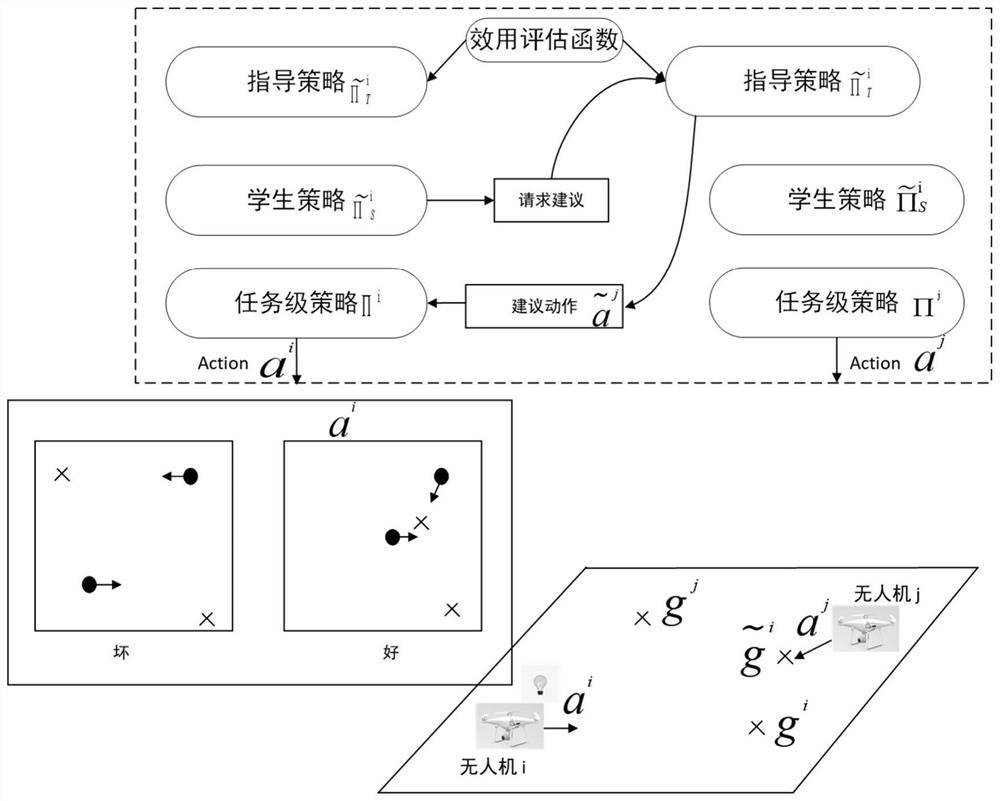
[0030] A collaborative learning method for UAV clusters based on multi-agent reinforcement learning. In UAV cluster control, each UAV plays the role of Student and Teacher at the same time. It follows the idea of MADDPG centralized training and distributed execution. UAV swarm collaborative learning. Include the following steps:
[0031] Step 1: Construct an aerodynamic environment simulator based on Unity3D and build a UAV cooperation cluster.
[0032] Step 2: The initial teammate information i...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More