

Intravenous injection robot needle insertion angle control method based on ultrasonic evaluation
An angle control and robot technology, applied in the direction of hypodermic injection equipment, drug equipment, other medical equipment, etc., can solve the problems of judging the angle of needle insertion, damage to blood vessels of patients, etc., and achieves wide application range, strong robustness, and improved Stability and Security Effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0037] The present invention will be described in detail below in conjunction with the accompanying drawings and specific embodiments. This embodiment is carried out on the premise of the technical solution of the present invention, and detailed implementation and specific operation process are given, but the protection scope of the present invention is not limited to the following embodiments.
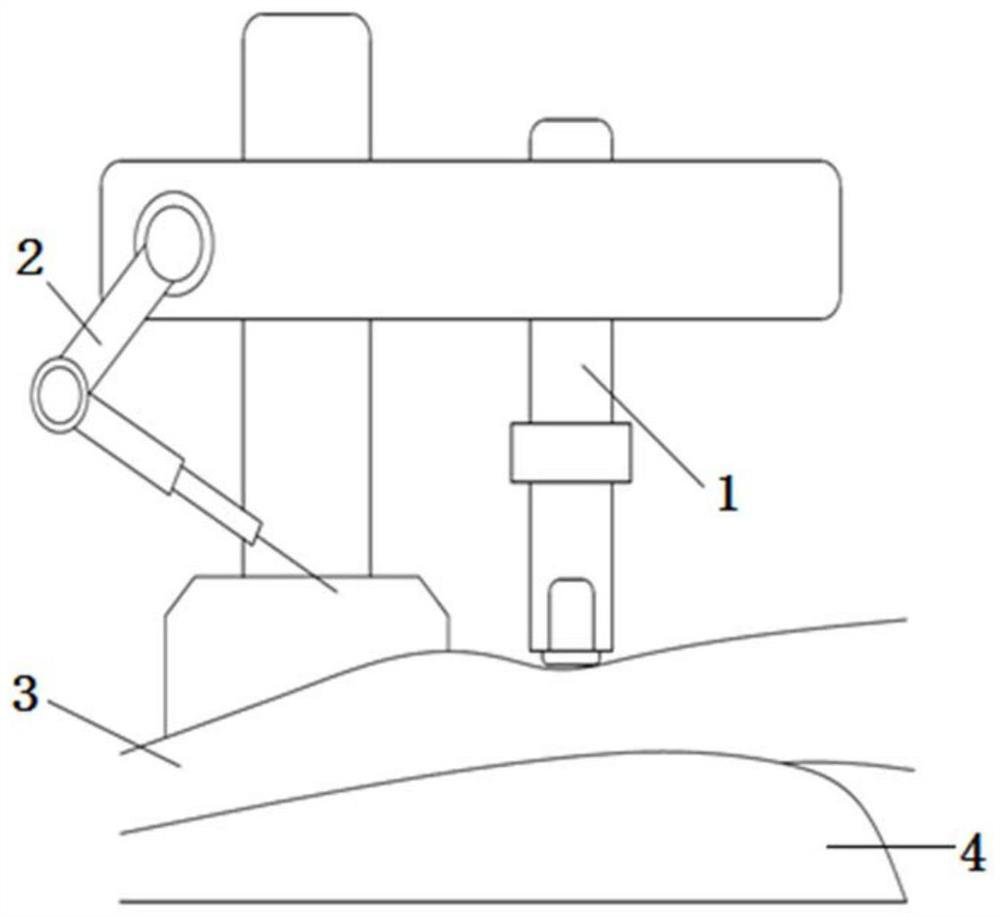
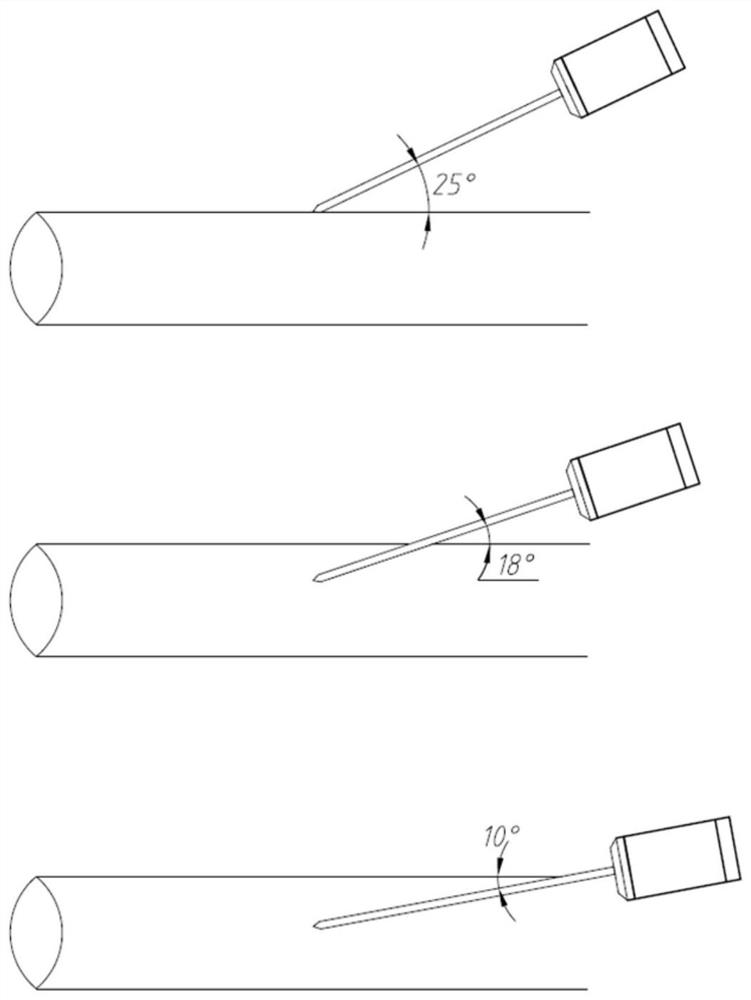
[0038] A method for controlling the needle entry angle of an intravenous injection robot based on ultrasound evaluation, which prevents damage to blood vessels caused by unsuitable puncture angles, and improves the stability and safety of venipuncture, such as figure 2 As shown, the IV robot includes a robotic arm and an ultrasound imaging module, such as figure 1 As shown, the specific steps of the needle insertion angle control method are as follows:
[0039] S1. Obtain the original venous blood vessel samples of different thickness;
[0040] S2. Perform ultrasonic recognition on...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More