

Pesticide spraying device controlled by full-autonomous mobile robot, and using method
A self-moving, pesticide spraying technology, applied in spraying devices, liquid spraying devices, devices for catching or killing insects, etc., can solve problems such as waste, labor cost, and personnel injury
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
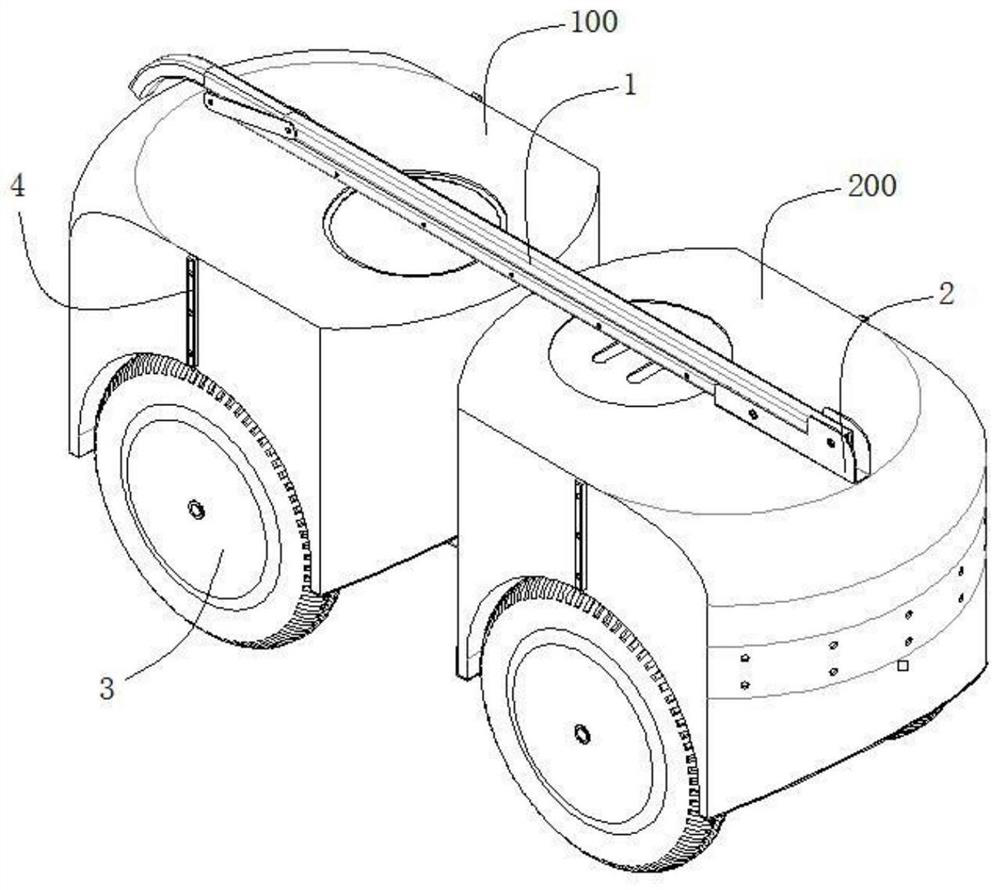
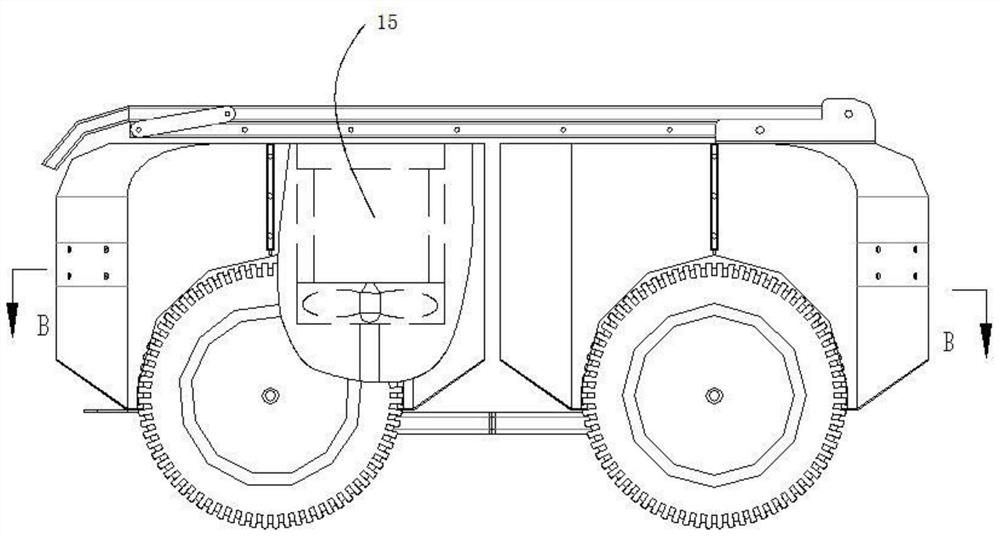
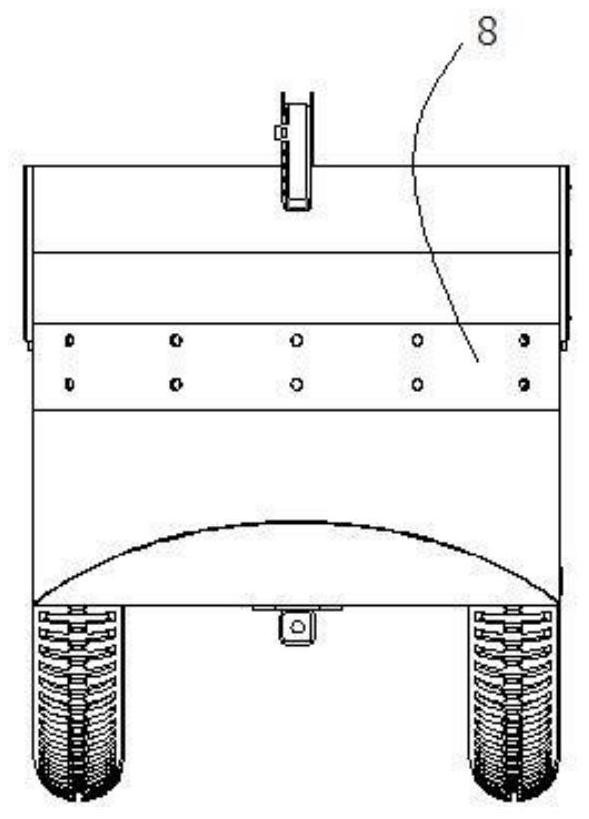
[0037] A pesticide spraying device and method of use controlled by a fully autonomous mobile robot, including a wheeled all-terrain robot frame, a control station and a control system, the wheeled all-terrain robot frame is composed of a head box 200 and a liquid medicine tank 100 and is in the form of a train In series, the head box 200 and the liquid medicine tank 100 are connected with a feedback coupling 6 through the feedback coupling 6, and the bottoms of both sides of the head box 200 and the liquid medicine tank 100 are equipped with automatic The driving wheel 3 and the self-driving wheel 3 are two, the A composite photoelectric sensor module 8 is installed on the surface of the head box 200 and the liquid medicine tank 100, and the C composite photoelectric sensor module 9 is installed on the front lower part of the head box 200, so The spray rod 1 is installed in the middle position of the top of the head box 200, the inspection cover 10 is installed on the top of th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More