

A multi-task coordination device and its control method
A control method and multi-task technology, applied in the direction of program control manipulators, manufacturing tools, manipulators, etc., can solve problems such as manipulator paralysis, waste of electric energy, and difficulty in exerting productivity, so as to avoid damage or product loss, and ensure safety and stability , The effect of ensuring work safety
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
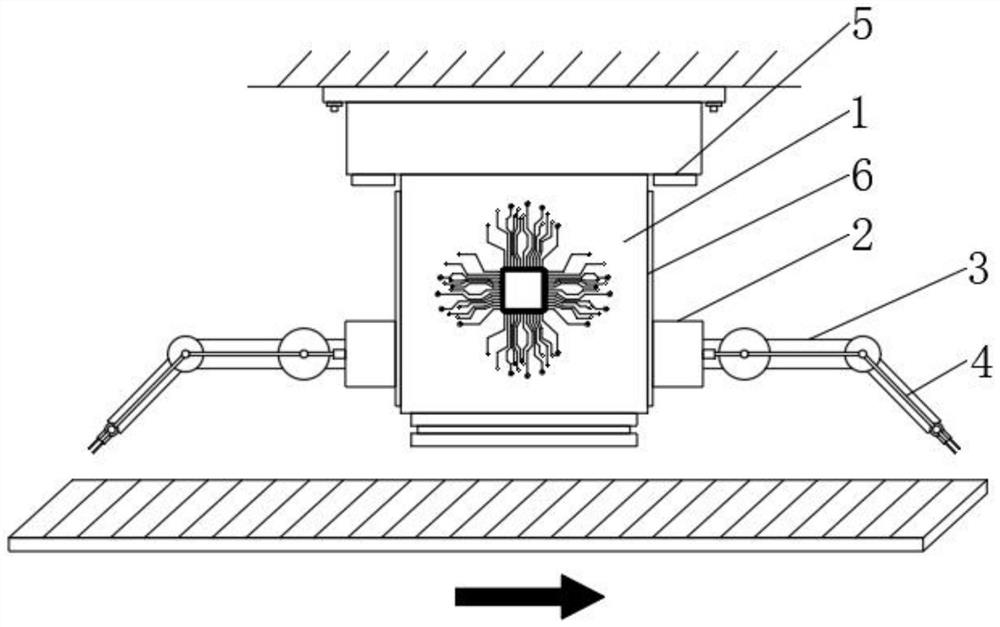
[0047] see figure 1 , a multi-task coordination device, including a main control station 1, a main controller module is embedded in the main control station 1, a plurality of guide rails 6 are installed on the outer end of the main control station 1, and a plurality of guide rails 6 are installed on the guide rail 6 The auxiliary control slide 2 is slidingly connected, and the manipulator 3 is installed on the auxiliary control slide 2. The main control station 1 is also connected with a plurality of suspension magnets 5 corresponding to the auxiliary control slide 2, and the suspension magnets 5 are located in the auxiliary control. On the upper side of the control slide 2, the outer end of the manipulator 3 is attached and connected with a cross monitoring tube 4 .
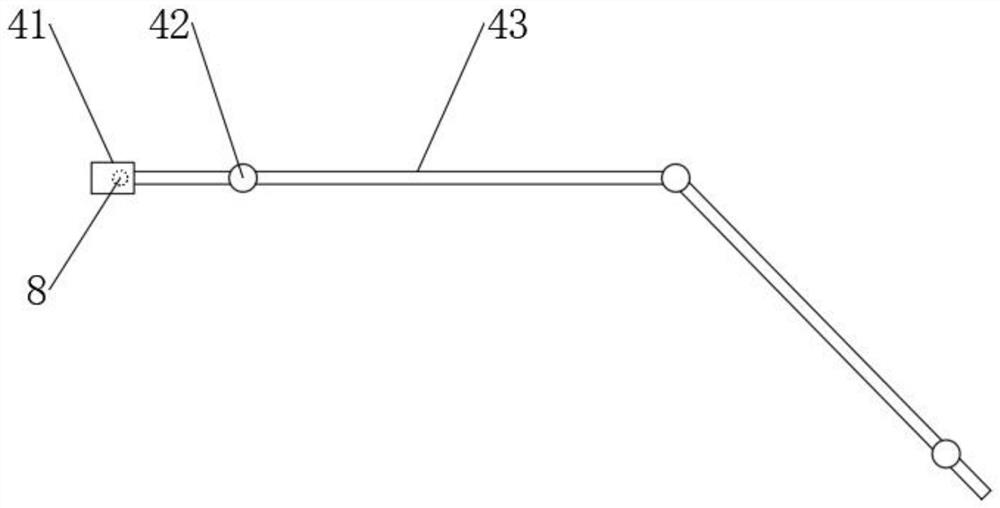
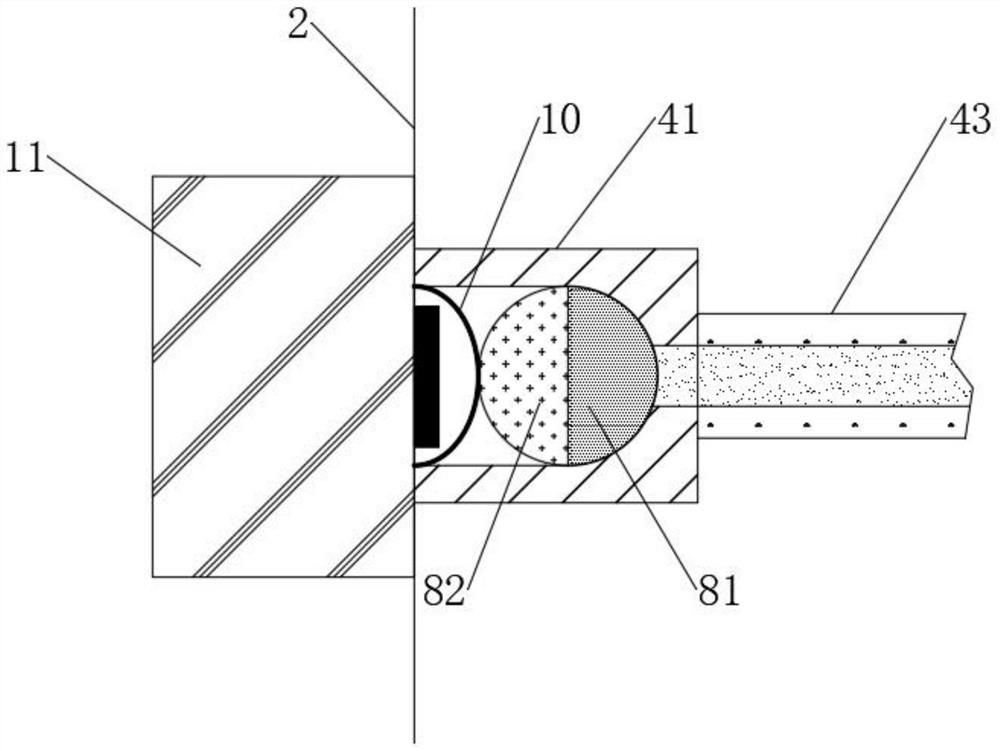
[0048] see Figure 2-3 The cross monitoring tube 4 includes a control trigger end 41 and a joint monitoring tube 43. A plurality of joint balls 42 matching the manipulator 3 are inlaid in the middle of the join...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More