

Unmanned aerial vehicle mobile platform landing method based on visual guidance
A mobile platform, vision-guided technology, applied in neural learning methods, computer components, non-electric variable control, etc., can solve problems such as data drift, insufficient positioning accuracy, and UAV landing, and achieve high speed and low performance requirements. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
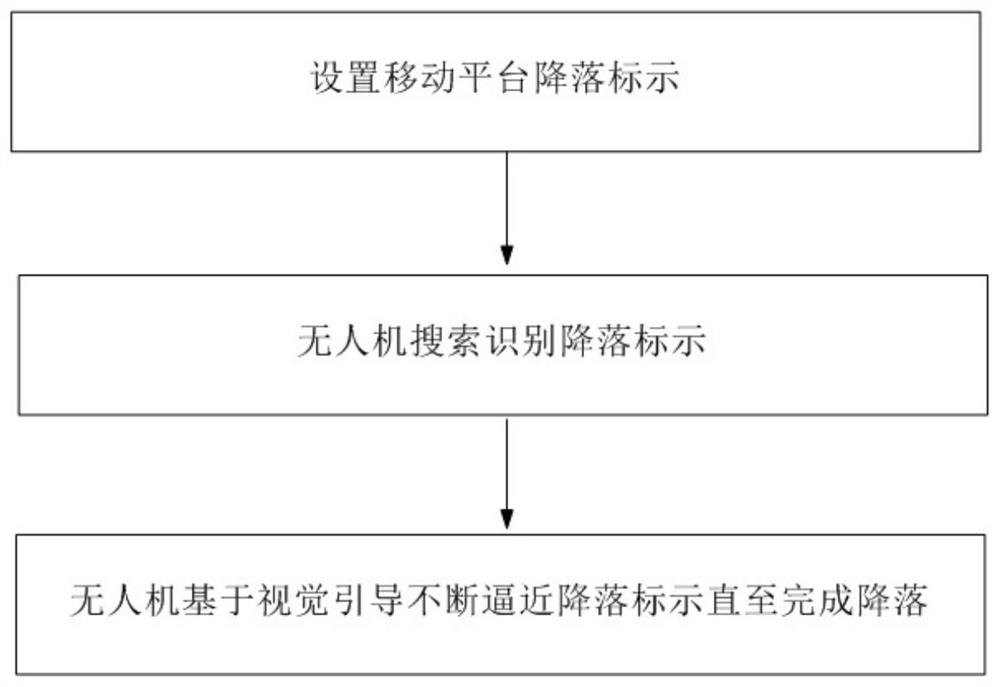
[0113] Carry out the landing test of the UAV vehicle-mounted mobile platform, set the landing mark on a motor vehicle, the motor vehicle moves on the site at a speed of 15km / h, and the maximum flight speed of the UAV is 10m / s.
[0114] The UAV takes off at the designated place and starts timing after takeoff. The photoelectric ball is in a downward static state when it takes off. When the UAV rises to a height of about 24m and hovers, the photoelectric ball starts to rotate to search for and identify the landing sign.
[0115] In the process of searching and identifying landing signs, the UAV’s onboard computer extracts 57 pictures per second from the video transmitted by the photoelectric pod, and first detects each picture through Canny edge detection. The LeNet-5 convolutional neural network recognizes the landing sign. After identifying the landing sign, the UAV approaches the landing sign at a speed of 5m / s. When the distance from the landing sign is 2m, adjust the recogn...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More