

High-redundancy indoor coal yard navigation method and system
A navigation method and technology of a navigation system, which are applied in directions such as navigation, mapping and navigation, and navigation calculation tools, can solve problems such as insufficient stability, large changes in geographic information, and reduced accuracy of SLAM methods.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
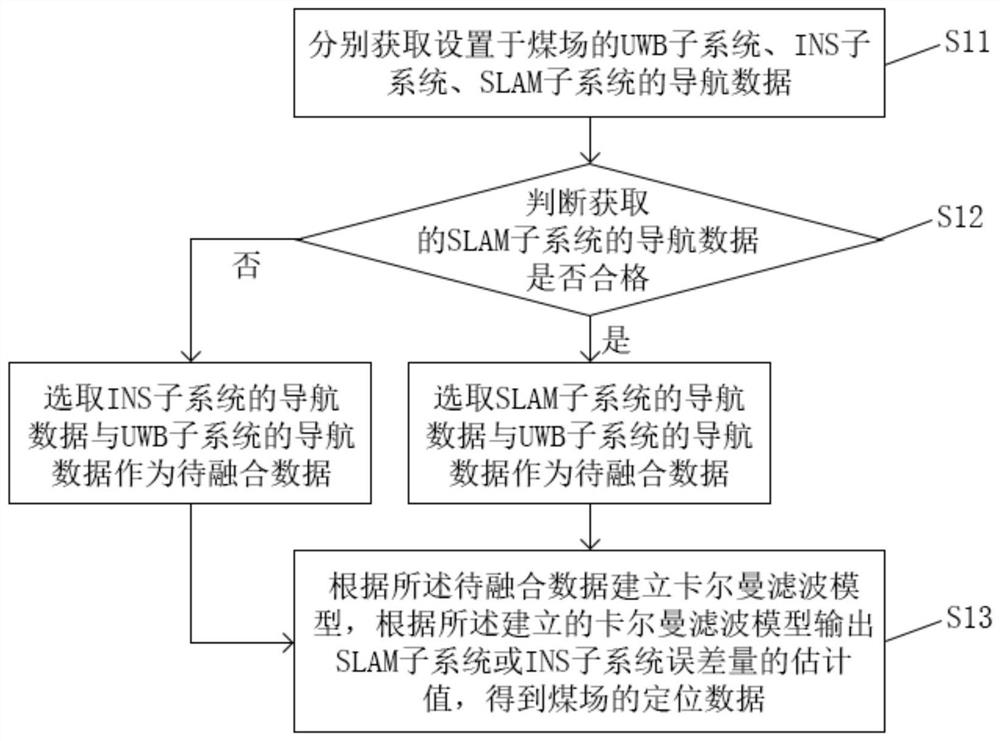
[0077] This embodiment provides a highly redundant indoor coal yard navigation method, such as figure 1 shown, including steps:
[0078] S11. Respectively obtain the navigation data of the UWB subsystem, the INS subsystem, and the SLAM subsystem arranged in the coal yard;
[0079] S12. Determine whether the navigation data of the SLAM subsystem obtained is qualified, if so, select the navigation data of the SLAM subsystem and the navigation data of the UWB subsystem as the data to be fused; if not, select the navigation data of the INS subsystem and the UWB subsystem The navigation data of the system is used as the data to be fused;
[0080] S13. Establish a Kalman filter model based on the data to be fused, output an estimated value of the error amount of the SLAM subsystem or the INS subsystem according to the established Kalman filter model, and obtain the positioning data of the coal yard.
[0081] It should be noted that the execution subject of this embodiment is a nav...
Embodiment 2
[0143] This embodiment provides a highly redundant indoor coal yard navigation system, such as Figure 4 shown, including:
[0144] The acquisition module 11 is used to acquire the navigation data of the UWB subsystem, the INS subsystem, and the SLAM subsystem respectively arranged in the coal yard;
[0145] The first judging module 12 is used to judge whether the navigation data of the SLAM subsystem obtained is qualified;
[0146] The output module 13 is used to establish a Kalman filter model according to the data to be fused, and output the estimated value of the error amount of the SLAM subsystem or the INS subsystem according to the established Kalman filter model to obtain the positioning data of the coal yard.
[0147] Further, the navigation data of the UWB subsystem acquired in the acquisition module 11 is the position x of the current moment of the drone U ; The navigation data obtained from the INS subsystem is the current acceleration a of the UAV I ; The navig...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More